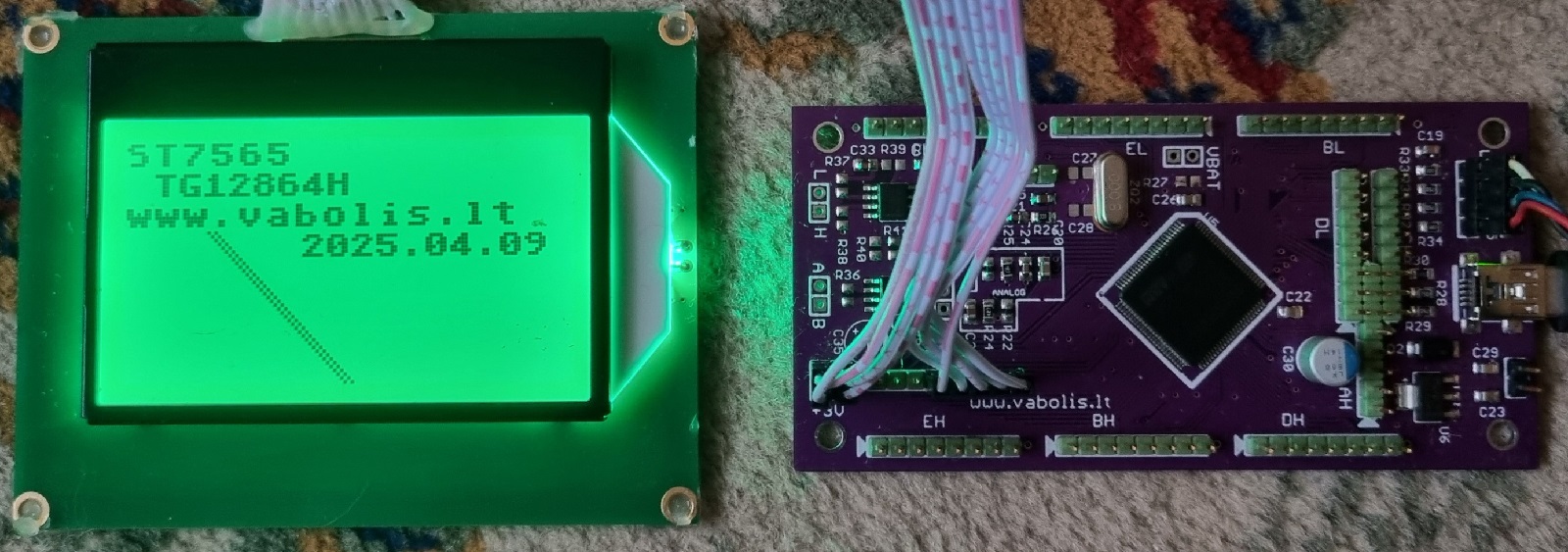
Tai dar vienas atmintinukas apie LCD ekraniukus. Tokie ekraniukai kogero eina iš kokio Ali, bet aš juos radau kažkokiuose kasos aparatuose. Iš įpatybių: Read Only, SPI.
Beveik viskas veikia naudojant standartines ST7565 bibliotekas, tačiau yra kažkoks bugas su inicializacija. Kol kas sprendimas- du kartus inicializuoti ekraniuką.
Kadangi nėra galimybės nuskaityti ekrano atminties, norint pasinaudoti grafinėmis funckijomis (taškai, nuskaityti tašką) reikia daryti šešėlinę atmintį (shadow ram) ir ten laikyti ekraniuko ekrano kopiją.
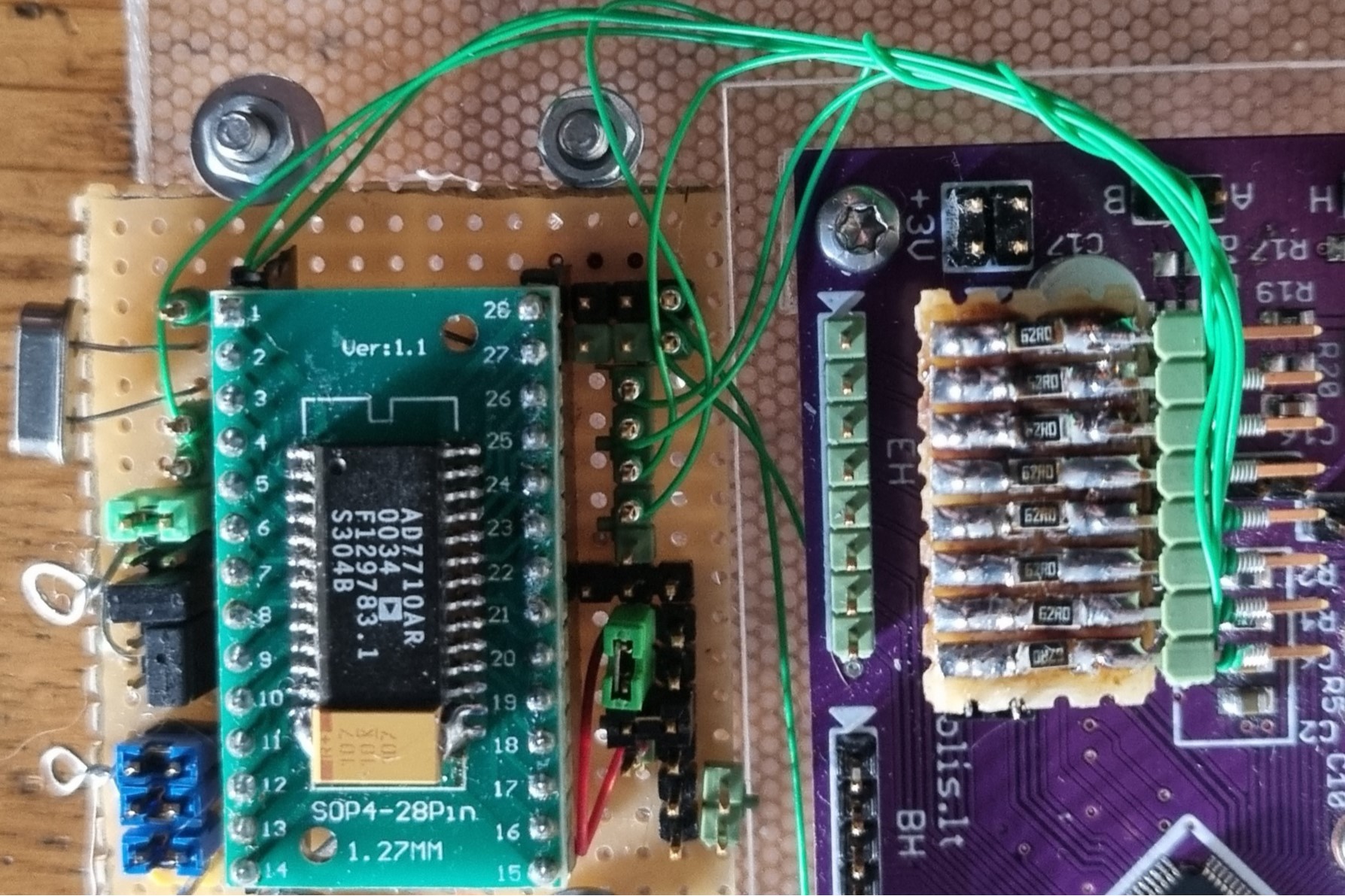
Seniai jau mėtėsi šis prabangus ADC- AD7710AR. Jis toks specifinis: aukštos įtampos maitinimas, beveik SPI ir 24 bitai.
Minimalus maitinimas- 5V, ir jo išėjimas labai arti 5V. Tačiau STM32F103 yra 5V tolerantiškas. Tačiau viskam yra ribos. MCU biški kaista. Todėl prie visų kojų nuosekliai pajungiau 64 omų rezistorius- gal kiek ir padėjo. Dar reikėtu dviejų maitinimo šaltinių- vienas skaitmenai (5V), o štai analoginei daliai kogero geriau net bipoliaris maitinimas. Tačiau iš bėdos galima prijungti prie 5V.
O štai su “SPI” interfeisu biški bėda. Primiausia čia pusė duplekso ir duomenys eina per tą patį laidą. STM32F103 lygtai ir palaiko tokį režimą, tačiau kelių dienų eksperimentai parodė, kad visdėlto neveikia. Arba CLK lieka pastoviai, arba nespėja persijungti ar tai nuskaito bet kokią informaciją. Ir dar, jaučiu problemos su mikroschemos greičiais.
O dabar dar viena kvailystė- jei nuskaitom duomenis kai įjungtas 16 bitų režimas, reikia ir skaityti tik 16 bitų, o jei skaitom 24, tai reikia ir skaityti 24. Ir dar reikia stebėti ar duomenys paruošti skaitymui. O dar yra kita kvailystė- atskiras valdymo pinas skaitymui ir rašymui, o ne vienas R/W pinas. Kodėl taip padaryta aš nežinau.
Internete neradau gyvo pavyzduko, kad viskas veiktu. Tačiau po eksperimentų gavosi, kad grynai “softwarinis” variantas puikiausiai veikia.
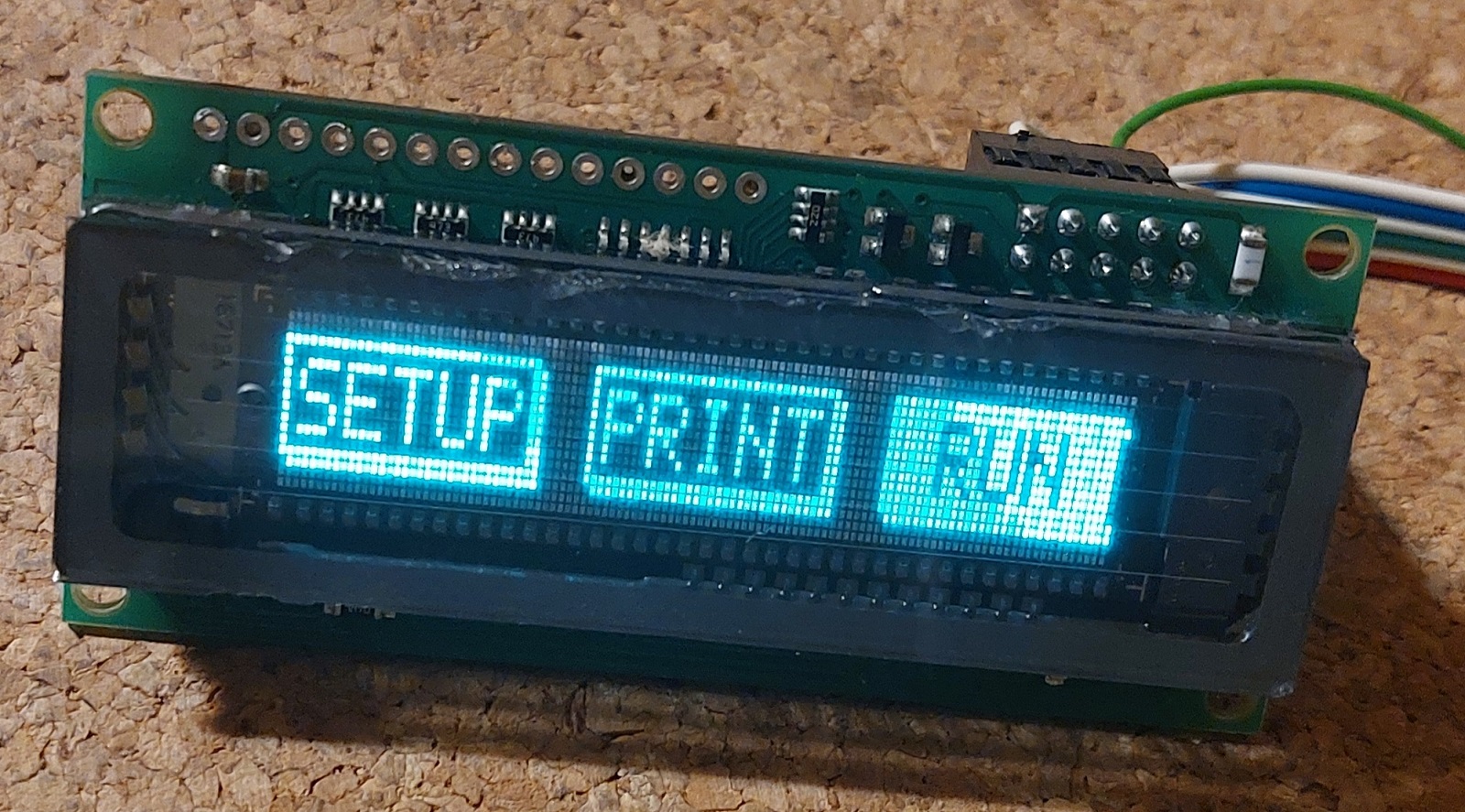
Dar biški VFD temos. Turiu kelis mažesnius grafinius VFD modulius: Futaba GU112x16G-7806A. Tai darvienas modulis suderinamas su standartiniu LCD moduliu. Tačiau tai kartu ir grafinis modulis.
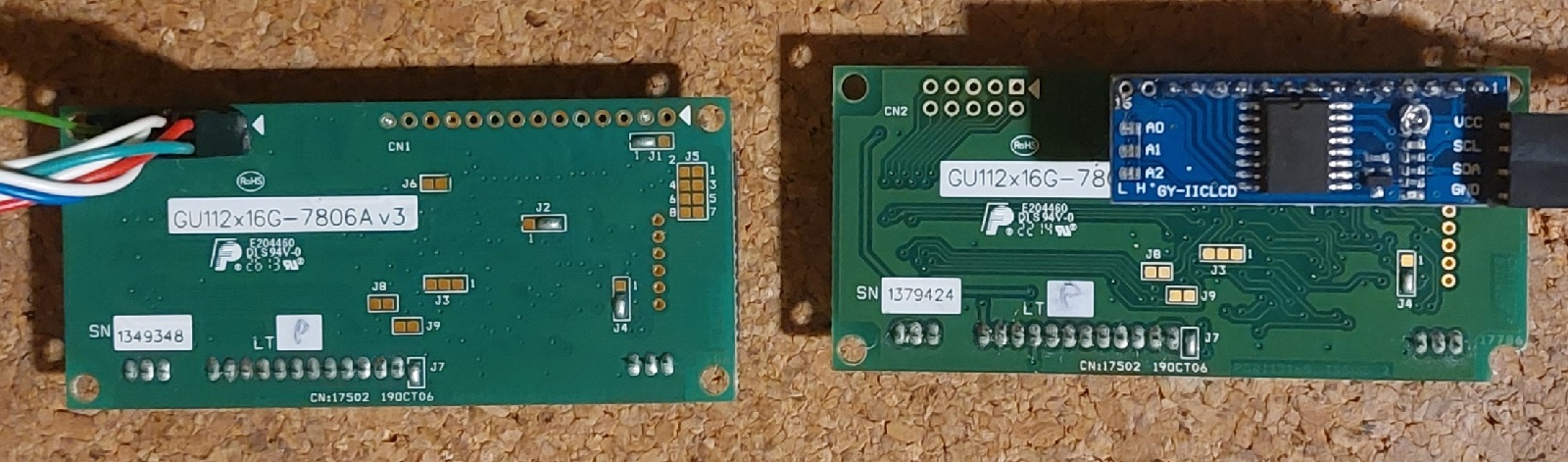
Šiame eksperimente aš nejungiau modulio prie standartinio paralelinio interfeiso, o pabandžiau su alternatyvinius metodus: SPI ir su papildoma plokštele- I2C (PCF8574). I2C variantas lėtokas. SPI variantas gretas, jei naudoti papildomą MB laidą per pertraukima. Šis MCU tikrai per greitas šiam moduliui ir buvo bėdų. O jei naudoti su hardcoded užvėlinimu, papildomo laido nereikia. Per i2c ir taip viskas veikia lėtai, todėl nereikia nieko stebėti.
Kairėje SPI, dešinėje su papildomu kinišku moduliu, I2C.
Atkreipkite dėmesį, kad šis modulis naudoja visai kitokį SPI variantą nei didesnis modulis.
Nors realiai tai GP9002A02A. Man patinka VFD technologija. Keista spalva, didelis šviesumas ir kažkoks lempinis vaizdas. Todėl jei matau kur nors palaidą VFD ekraniuką, stengiuosi prigriebti. Aišku aš kalbu apie panaudojamus modulius, o ne kažkokius “custom made” iš senoviškų magnetofonų. O kiek kartų mačiau milžiniškus grafinius modulius kurie buvo sudaužyti- stiklinis korpusas neduoda tvirtumo. O šis modulis nukentėjo kitaip- jo trafukas su plonučiais laideliais atitrūko nuo transformatoriaus korpuso. Teko klijuoti ir užsiimti mikrochirurgija- trafukas visgi smd.
Tai grafinis ir tekstinis modulis. Galima pumpuoti binarinę informaciją arba galima naudotis integruotais šriftais ir kiek keistokais šrifto dydžiais. Ekranas kaip ir “grayscale”, bet man nepavyko. Gali būti, kad yra skirtumas tarp “01A” ir “02A”.
Futaba moduliai dažnai būna ne tik lygiagretaus interfeiso, kaip LCD moduliai, bet turi slaptus papildomus interfeisus: asinchroninis nuoseklusis (kaip RS232, tik TTL lygiai) ir SPI (synchronious serial). Asinchroninis dažnai būna per lėtas, net prie 115kbit matosi kaip formuojasi vaizdas. Paralelinis naudoja labai daug laidų, tačiau labai greitas. O štai SPI kaip ir kompromisas. Pas šį VFD maksimalus greitis kažkur 2Mbit. Nauji moduliai dažnai būna USB/HID- tokių dar nečiupinau.
Su STM32CubeMX sugeneruojam programos griaučius. Aš pasirinkau kojeles iš eilės. Procesoriukas- bet koks. Čia konkrečiai STM32F103VBT6. Kur kibirą turiu.
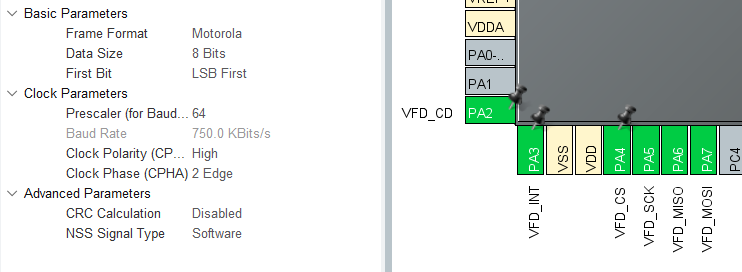
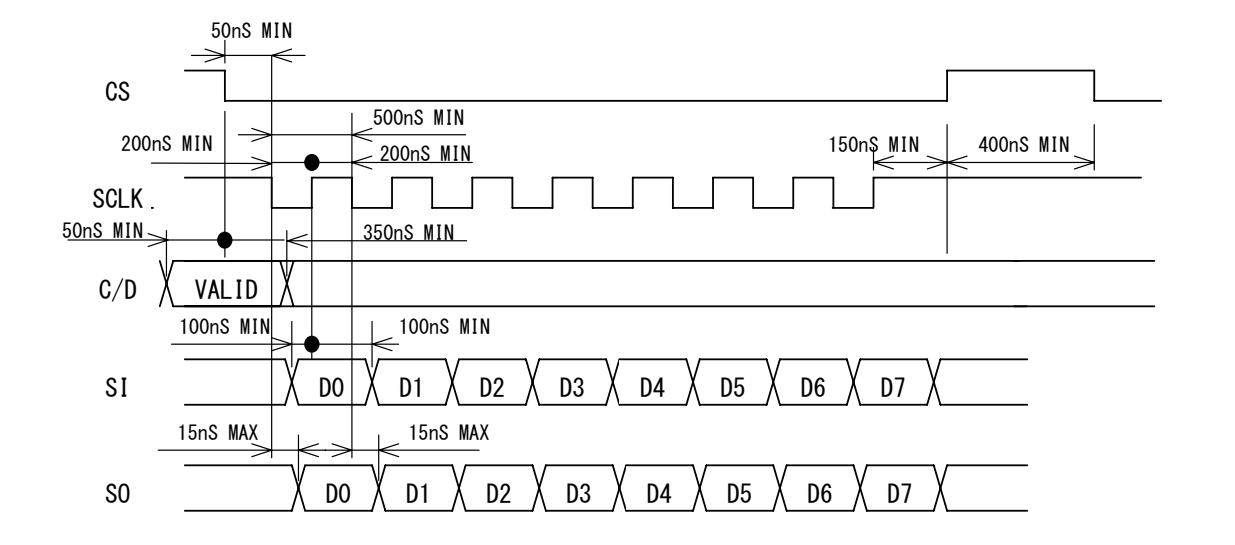
Mums be SPI, reikia CD (command/data), CS (chip select) ir jei norime gražiai animuoti: VFD_INT (čia kadrų sinchroimpulsas). CS – programinis, nes yra biški triukų. Net porą vakarų turėjau praleisti, kol pradėjo teisingai veikti. Trumpai- CS, CD ir SPI sekos svarbios!
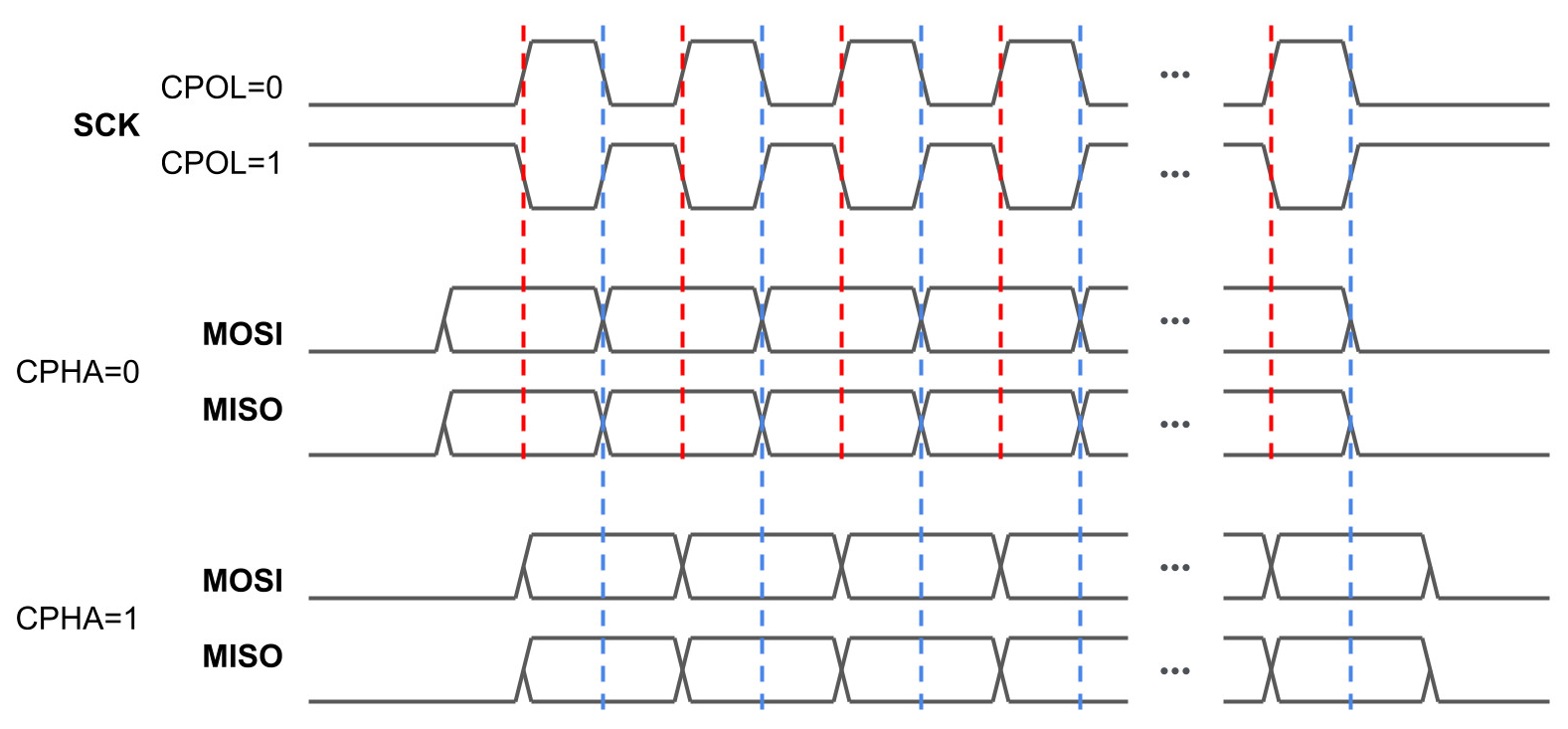
Iš datašyto matom, kad SPI nėra defaultinis. Pirmiausia LSB, antriausia netipiniai CLK. Dar žiūrom į C/D.
Labai padeda susigaudyti settinguose šis vogtas iš interneto paveikslėlis. Renkam tą kuris panašiausias:
Beveik visos komandos surašytos į programą. Aišku kiek užknisa ekrano atminties organizavimas, bet viską galima apeiti naudojant galingus MCU.
Kartais nėra apie ką rašyti, tai nutariau aprašyti savo sėdimas/gulimas darbo vietas.
Čia mažiausiai su darbu susijusi darbo vieta. Čia kartais vyksta intelektualiniai pokalbiai, ieškoma internete ar šiaip. Šis kompiuterius iš šiukšlyno ir pagrinde groja muziką. Klaviatūra aprašyta mano bloge– tai iš aero uosto terminalo.
Pereinam į kitą pastatą:
Čia naujausia darbo vieta. Tipo “sysadmino” urvas. Laidų chaosas 19″ spintoje ne mano nuopelnas.
Pereinam į kitą pastatą:
Čia praleidžiama gana daug laiko. Tik nesimato XRF, jis kažkur išneštas fotografavimo metu. Dešinėje- mikrobanginis mineralizatorius. Reikėtu jį išmesti, bet ranka nekyla- veikiantis daiGtas. Viršuje centre savadarbis “darbo laiko” laikrodis, plastikinių kortelių printeris, lipdukų printeris. Šiaip lipdukų printerių daug. Paprasčiau daryti taip, jei reikia spausdinti skirtingo dydžio lipdukus nei kaitalioti popierį.
O dabar kito tipo patalpa:
Meditacinis akvariumas. Ten tikrai ne rūkas viduje. Paprasčiausiai radau kalną smilkalų kurie supelijo. Todėl juos visus susmilkinau. 🙂
Kita patalpa:
Pagrindinė litavimo ir kompiuterinių žaidimų vieta. Iš chaoso ant stalo- nei lituoju nei žaidžiu paskutiniu metu.
Ta pati patalpa, kitas kambarys:
Čia pagrindinė degradacijos ir programavimo vieta. Programavimo konsultantas pasiruošęs. O apačioje mėtosi gabalai dar nepublikuoto projekto su kodiniu pavadinimu “Trimix“. Jei bendraautorius ir sponsorius leis, bus daugiau informacijos.
Šiaip yra dar viena vieta kur galiu pasislėpti. Todėl jei kartais nerandat manęs, tai aš kažkur esu čia.
Šis mano blogo postas kažkiektai susijęs ir su šiais laikais, bet pagrinde tai senovės istorija- kai tarybų sąjunga pradėjo kažkiek purkštauti po antrojo pasaulinio karo, atsirado sankcijos. Ir konkrečiai COCOM , kuris draudė parduoti rusams visokias gerybes. Aišku buvo visokių apėjimų kaip su ДВК1 – DEC ir IBM 3602 klonavimu. Tačiau progresas nesustojo, atsirado PC. Ir prireikė tokių kompų, kad su GW-BASIC ar kokiu nors Paskaliu programuoti tarpkontinentines balistines raketas. Todėl partija nusprendė- догнать и перегнать3 ar paprasčiau šnekant, nukopijuoti (pavogti) PC XT (1984) o gal ir PC (1981). Kodėl XT? Todėl, kad AT jau pernelyg sudėtingas. Ir kažkur į aštuoniasdėšimtųjų gale gimė уёбище4 vardu НЕЙРОН И99.66.01. Jau toks vardas su skaičiukais sako, kad tai gaminys ne “liaudies masėms”. O karinei pramonei, kokiems nors шарагом5 ar atominėm elektrinėms.
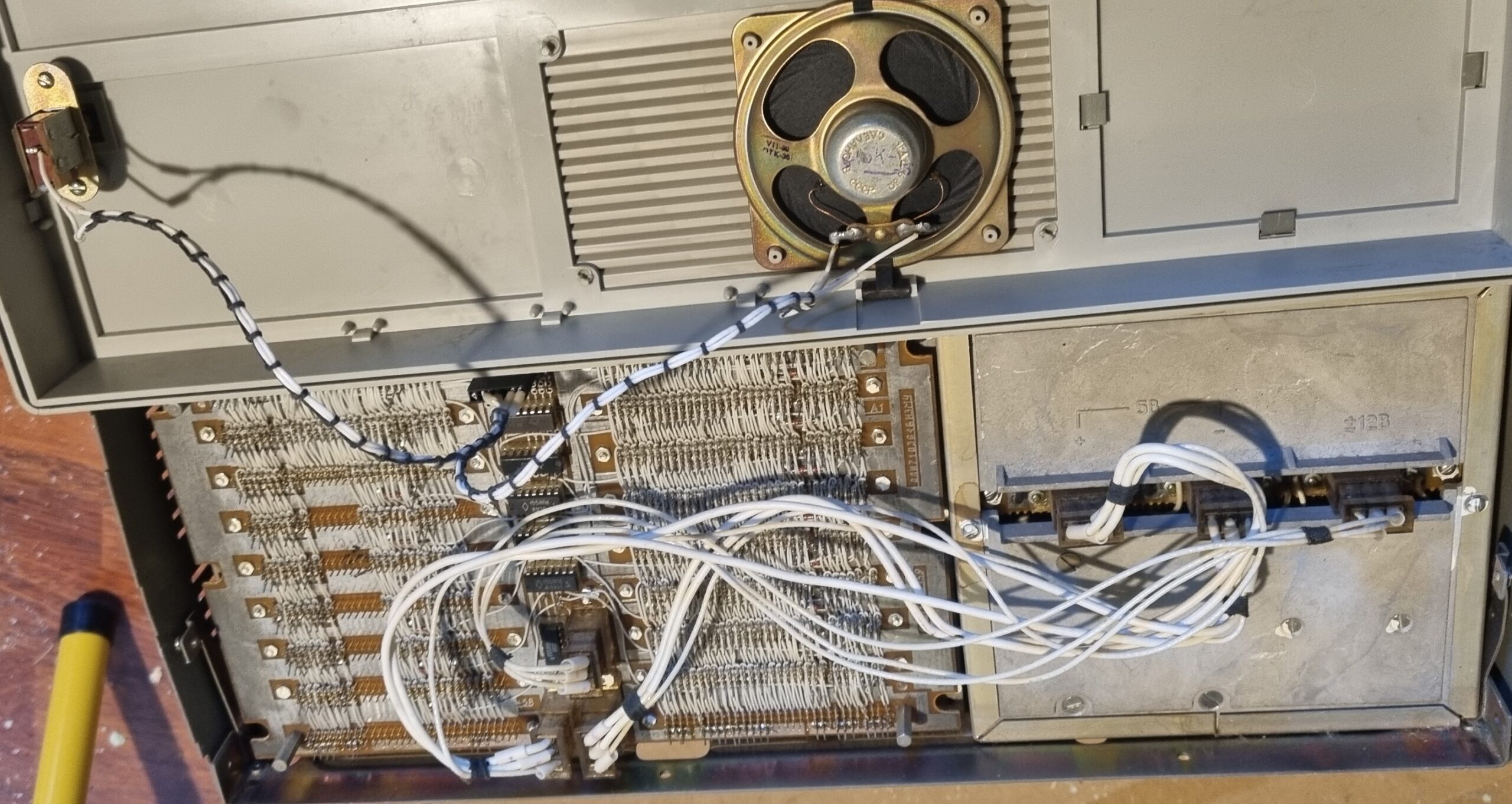
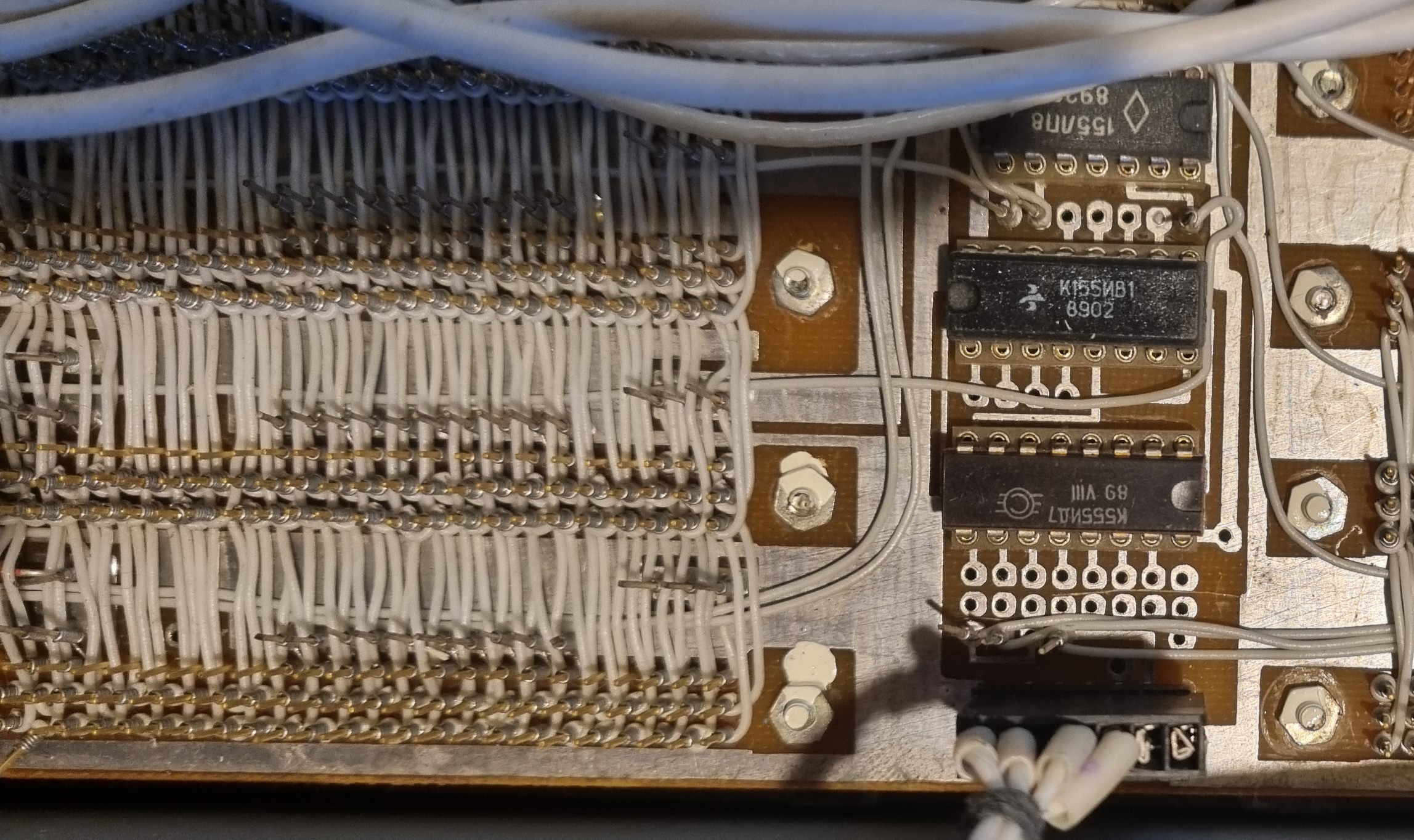
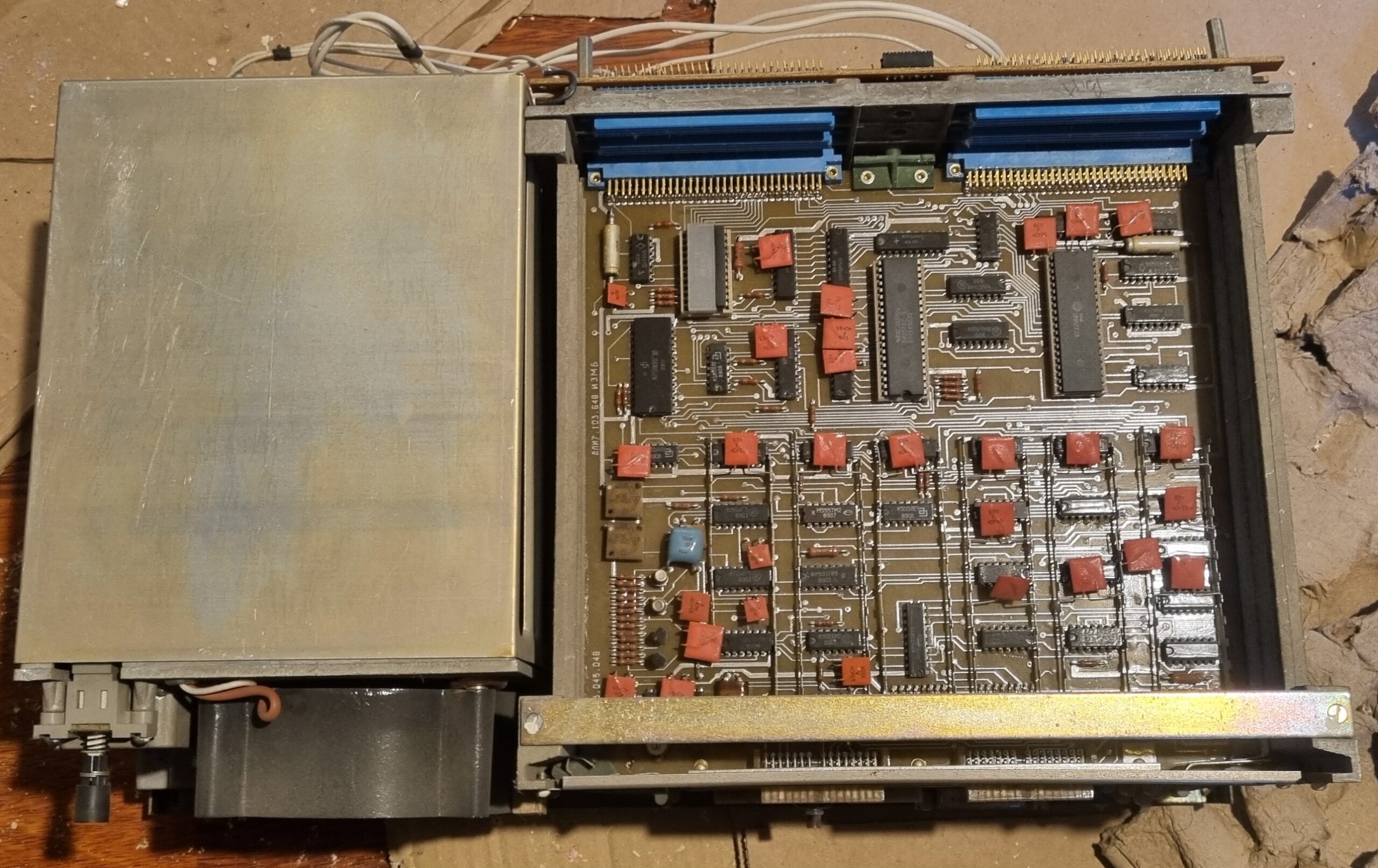
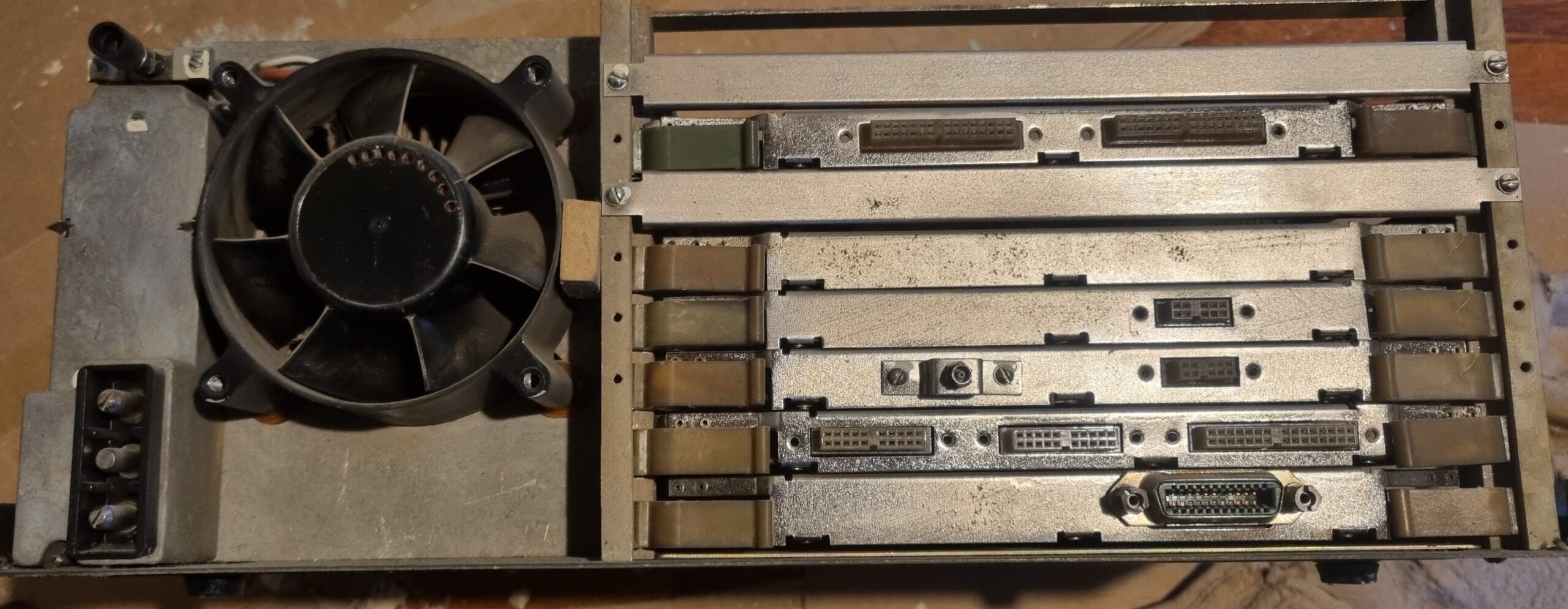
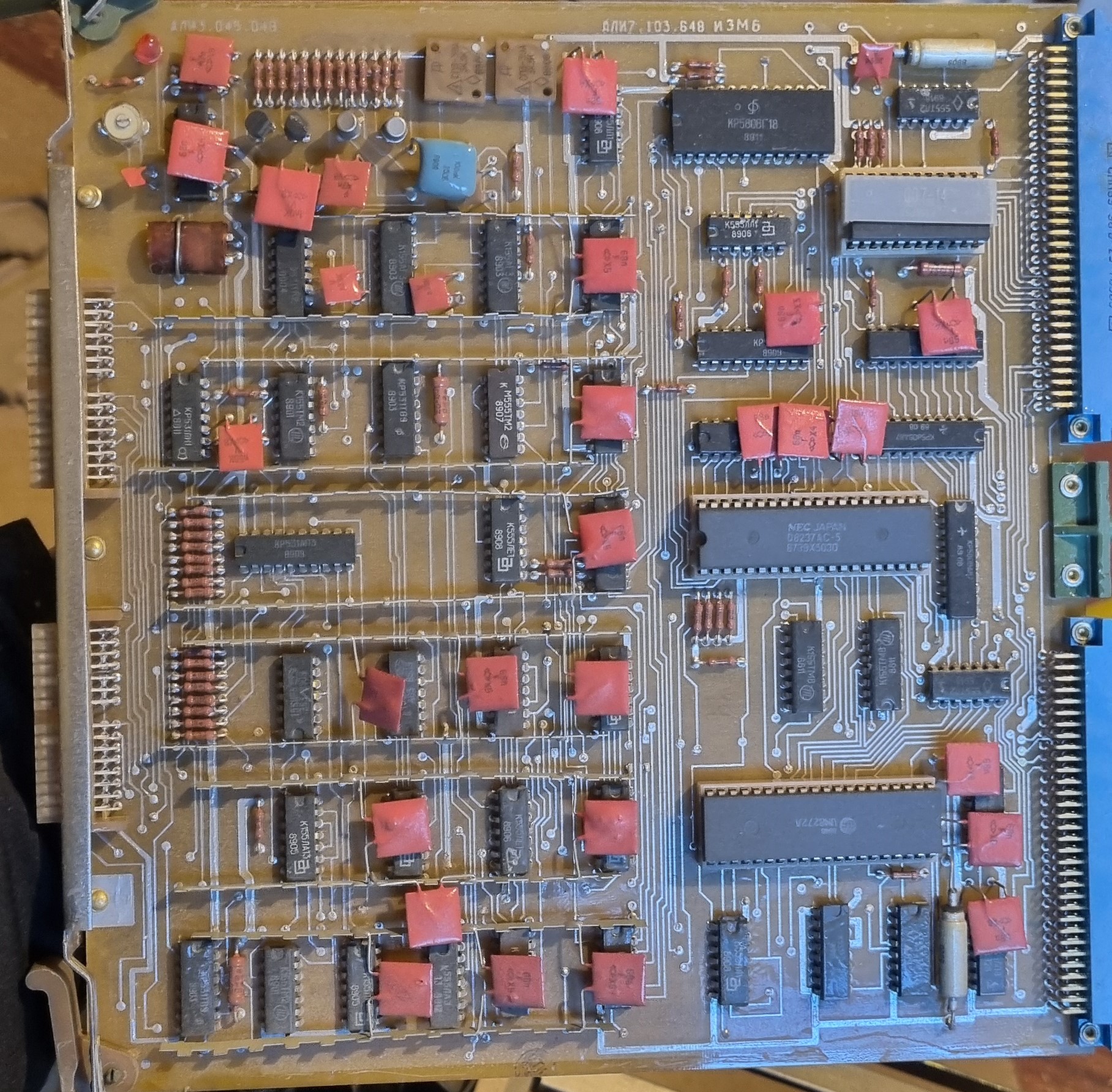
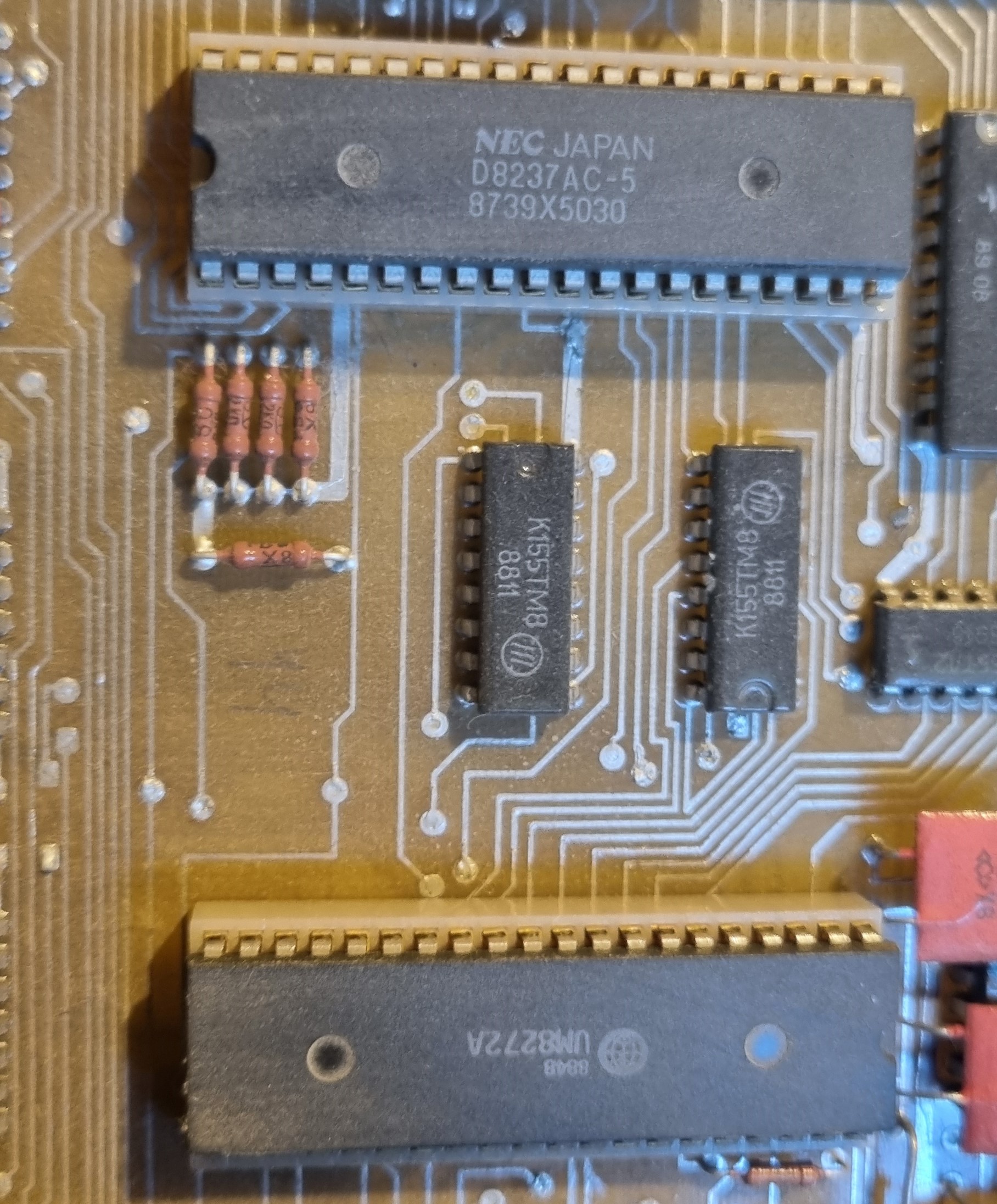
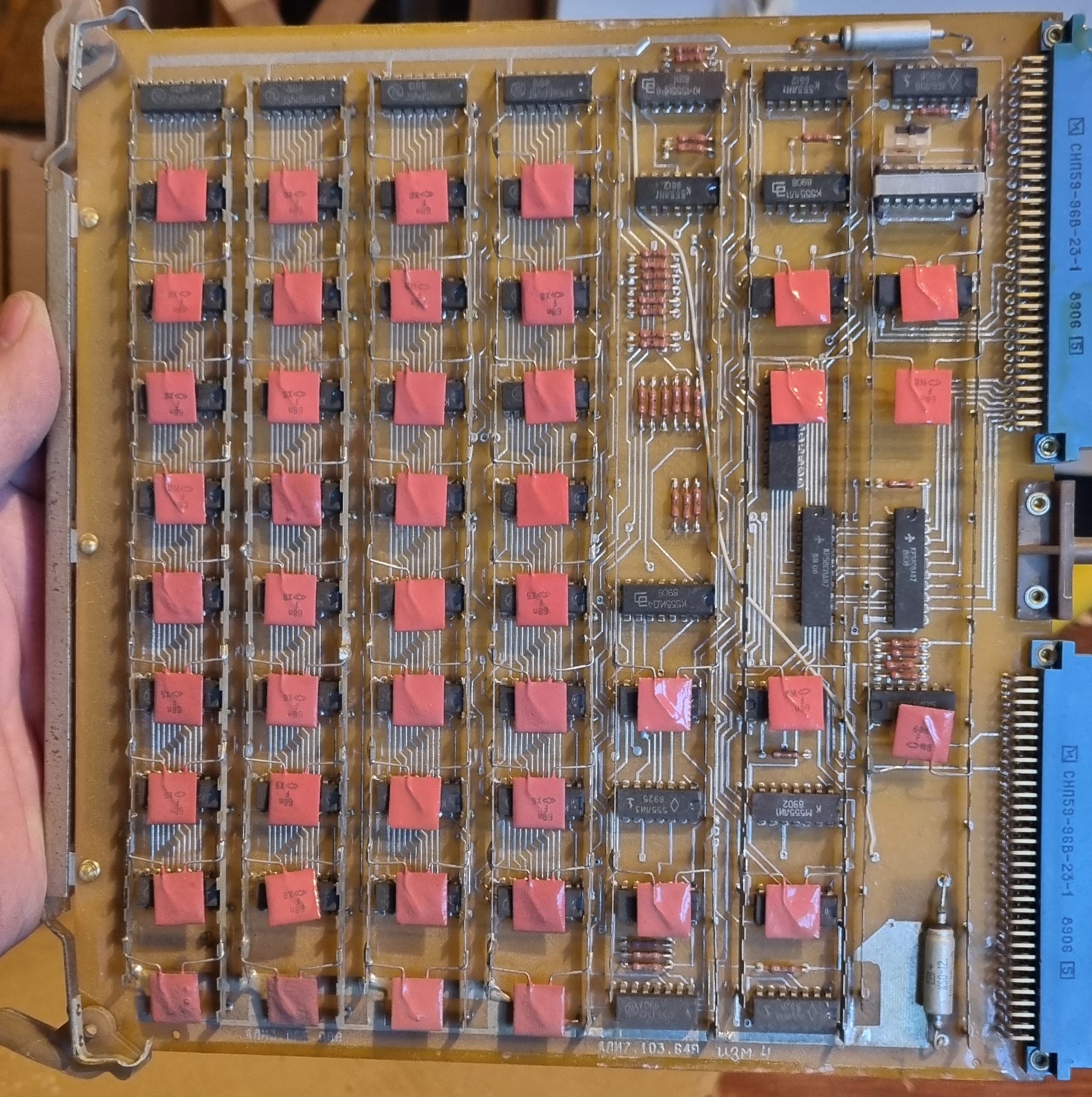
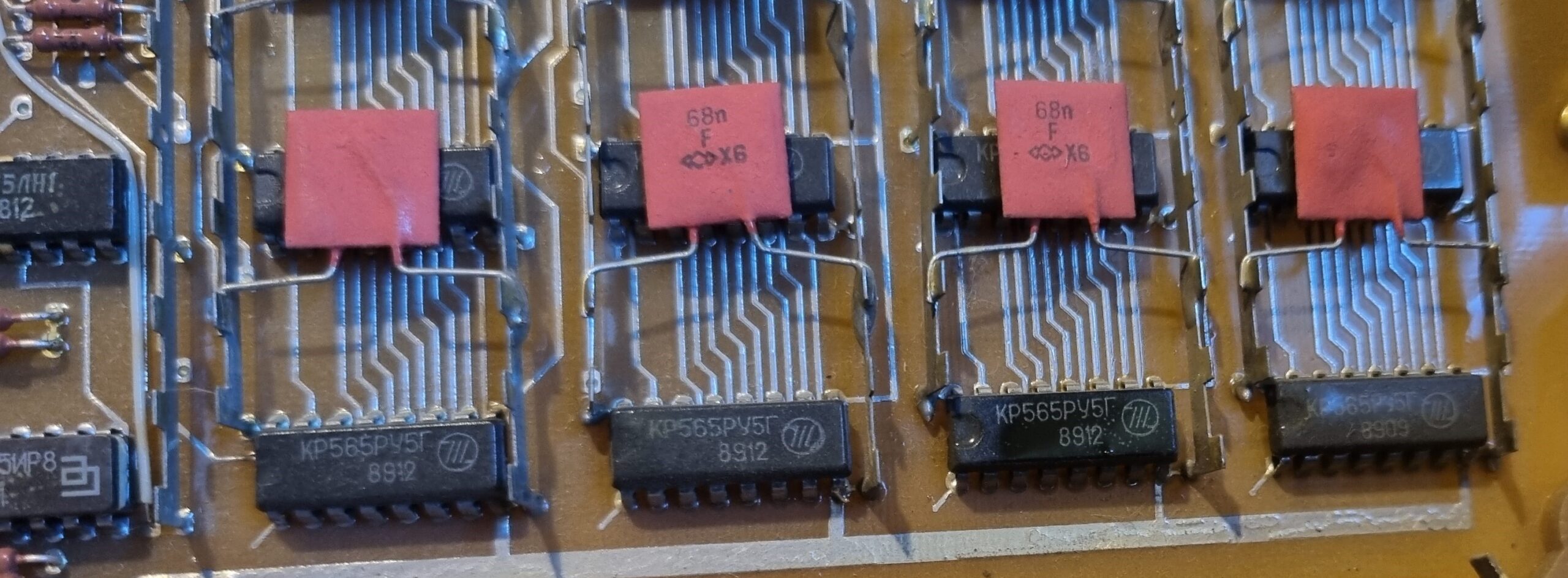
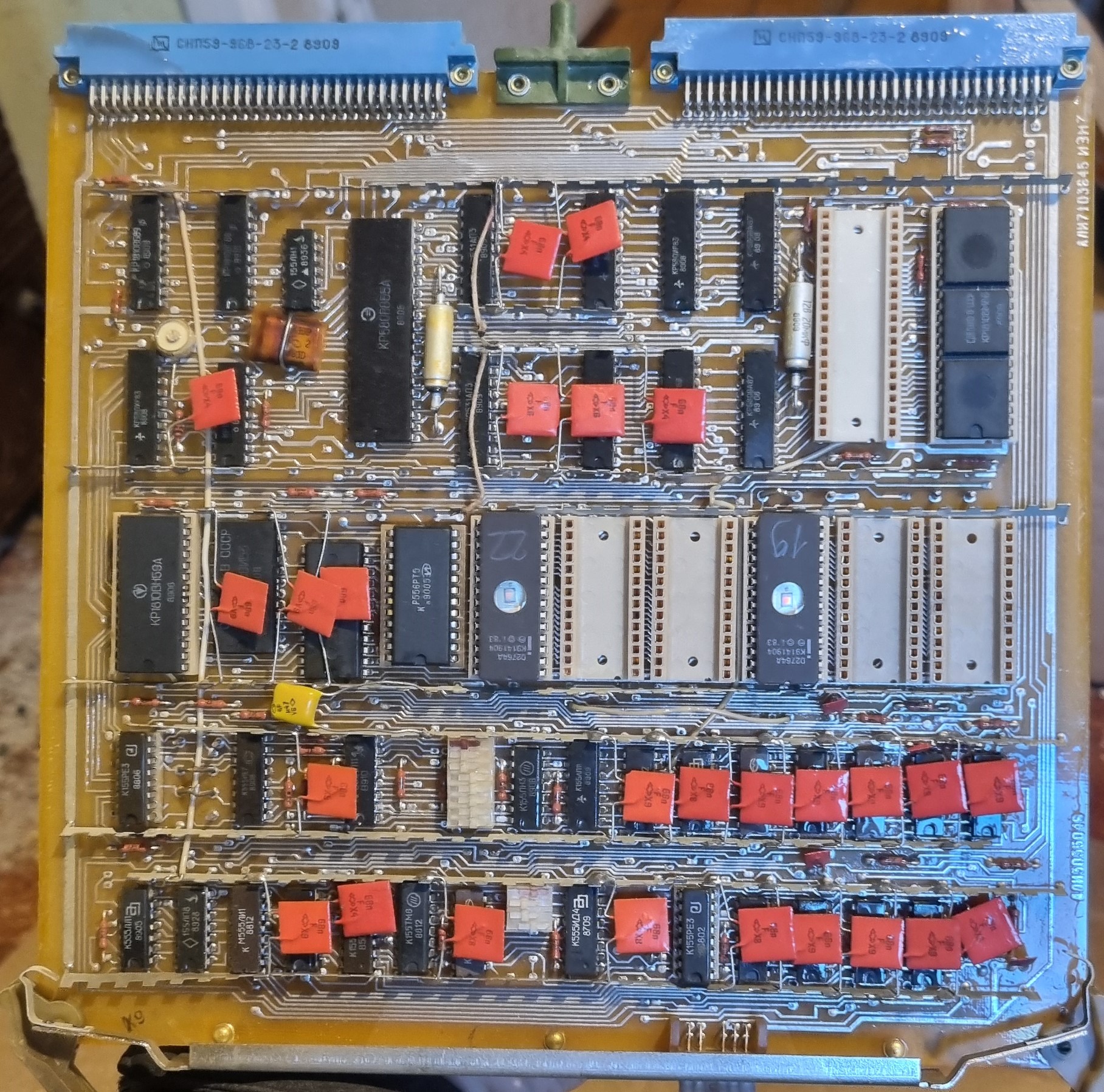
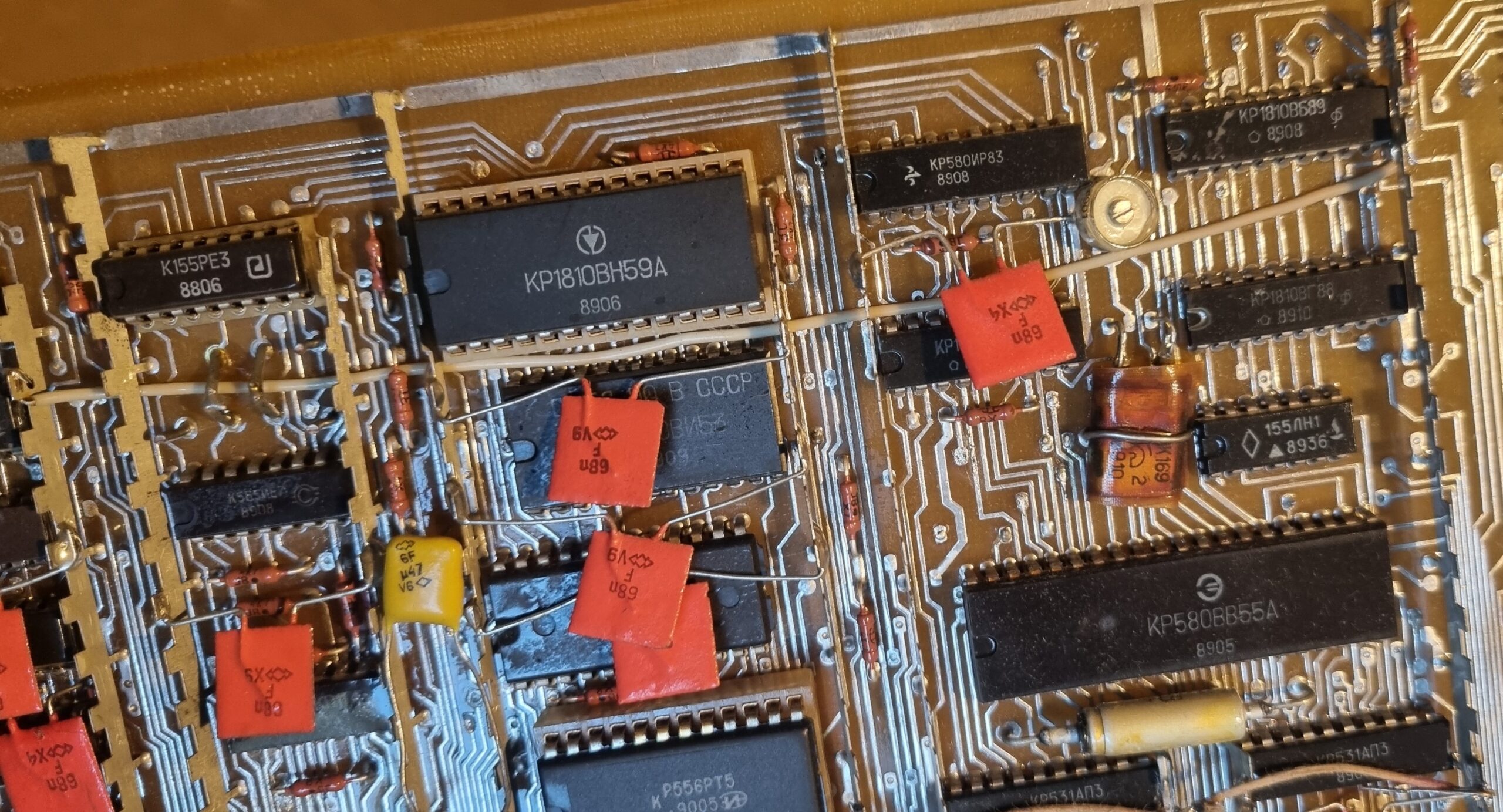
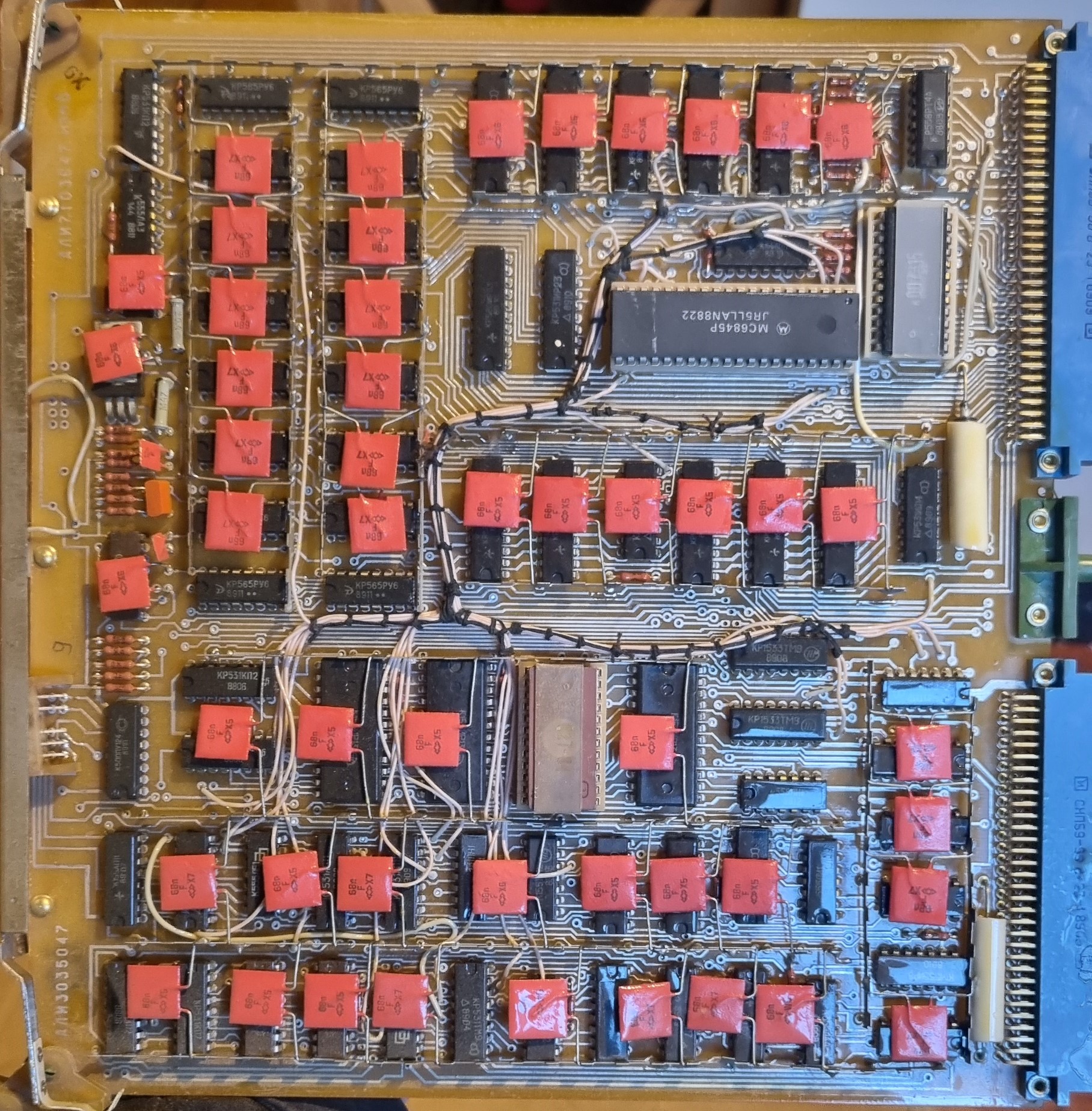
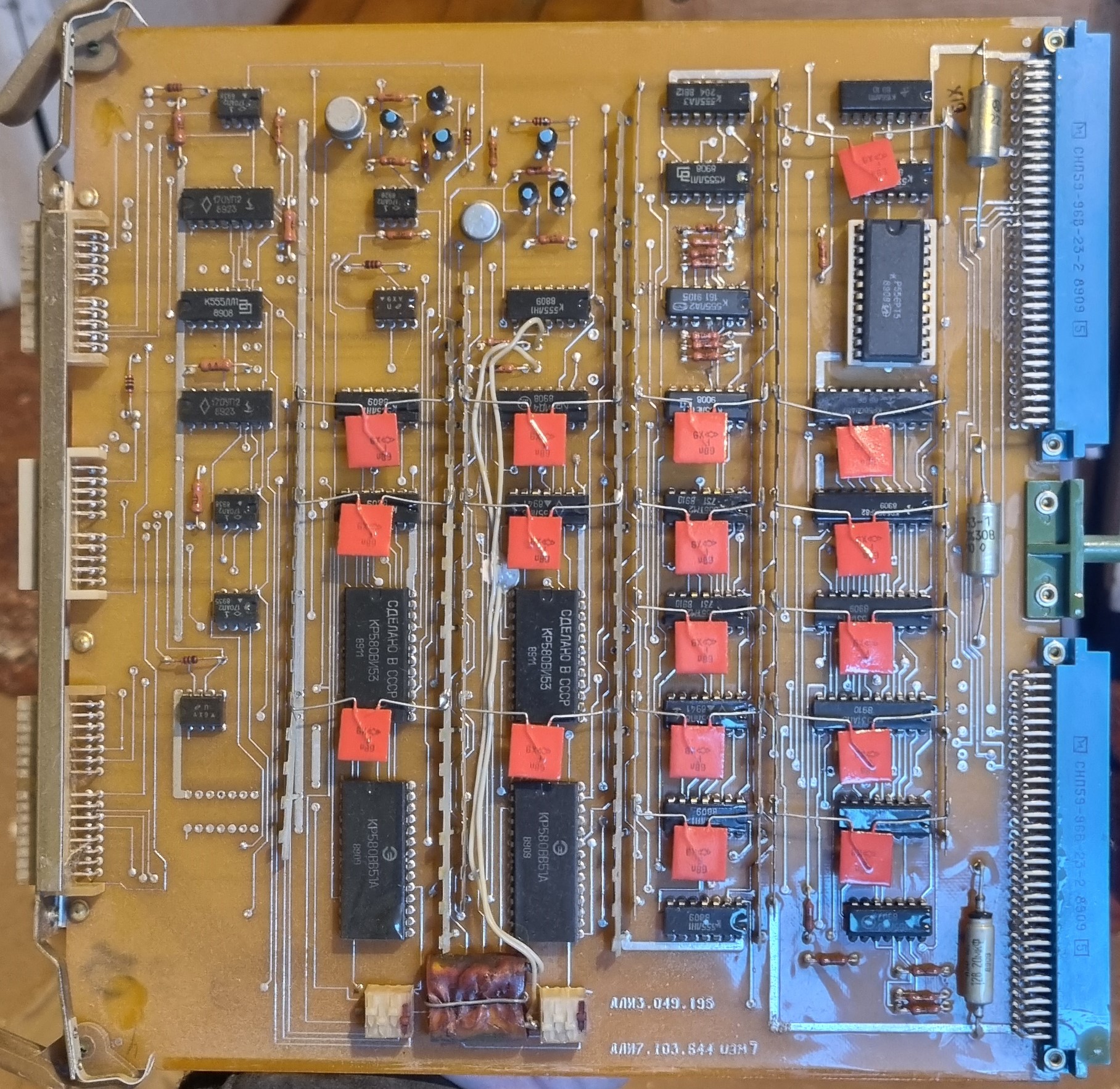
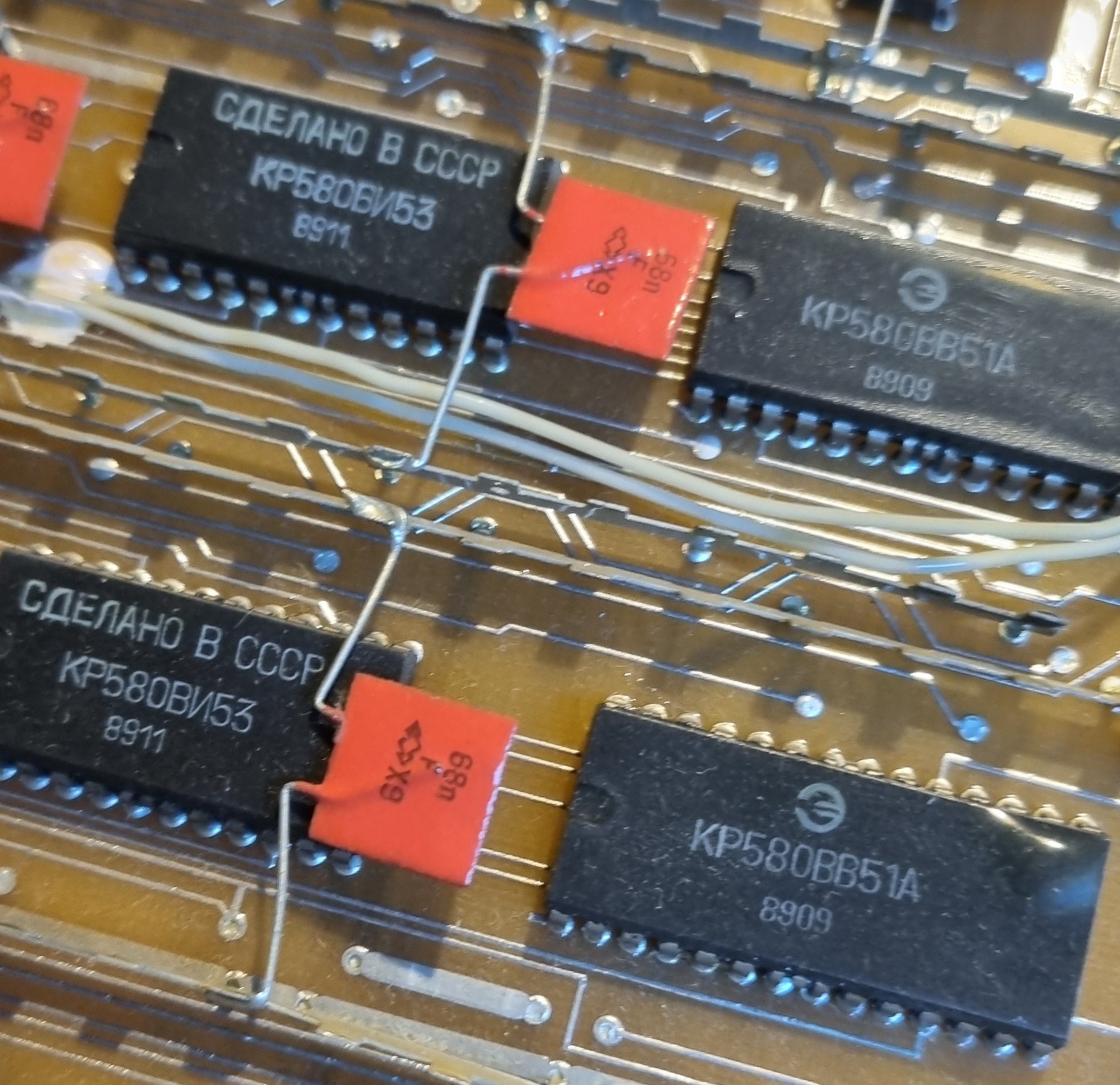
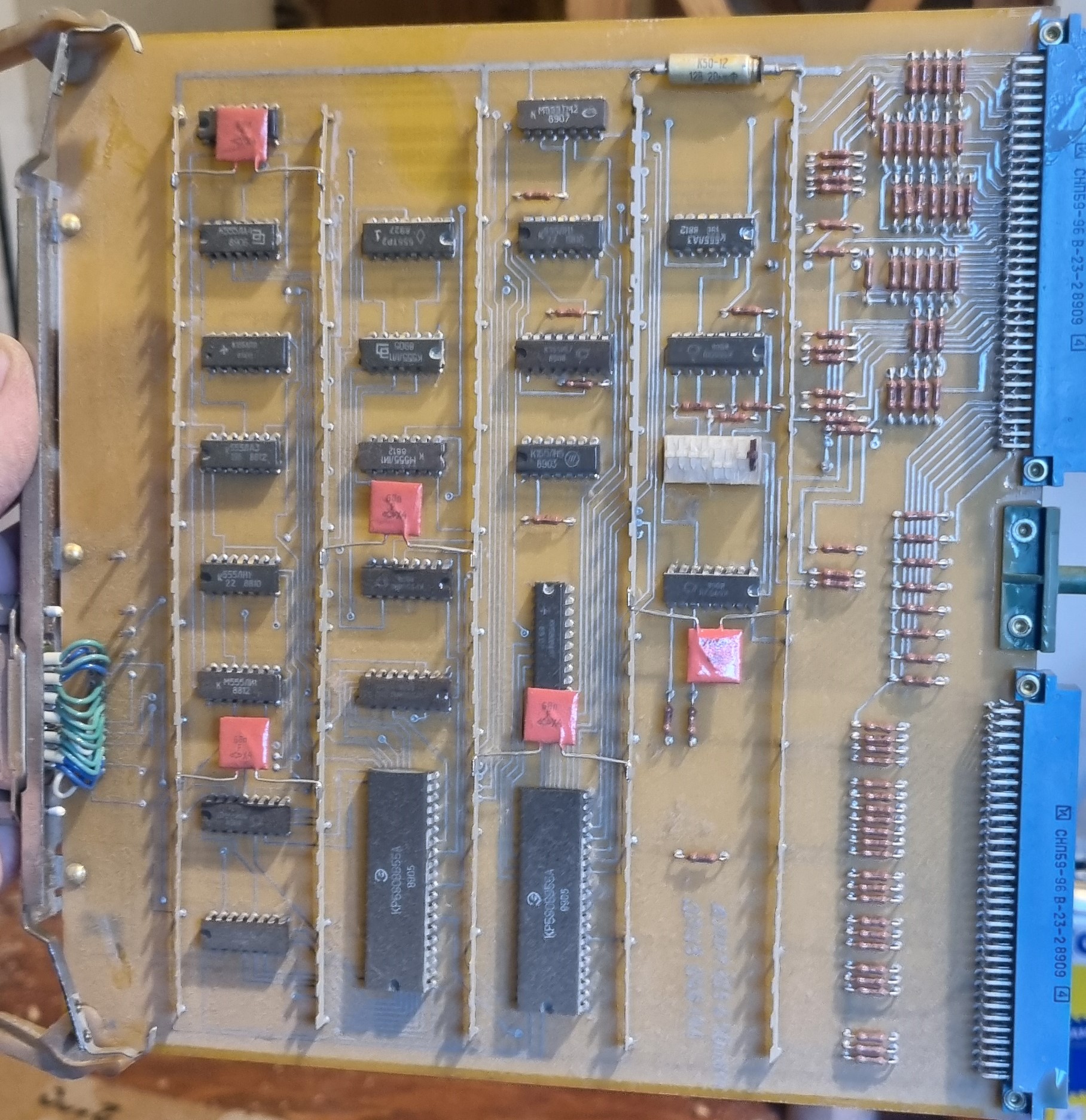
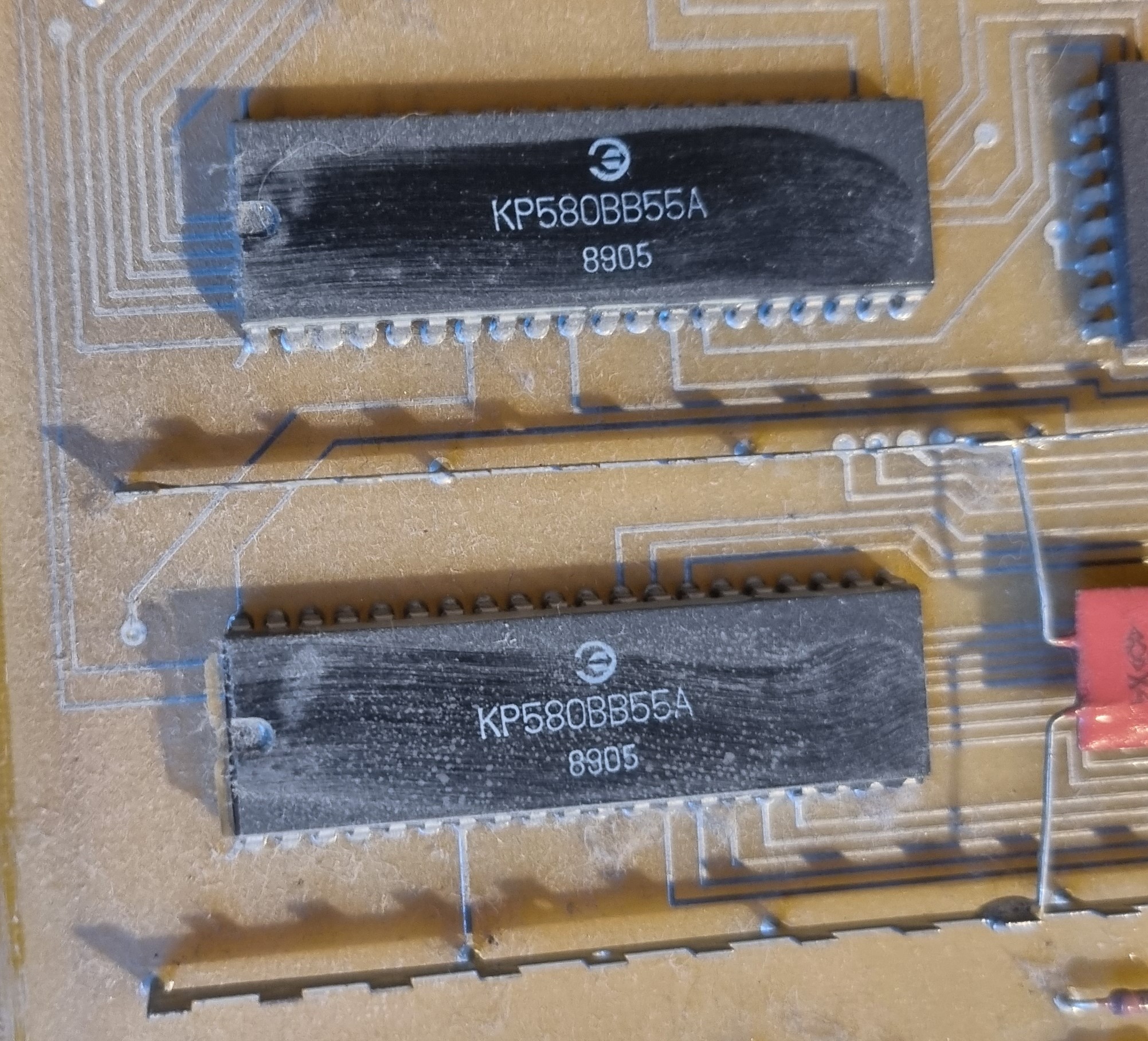
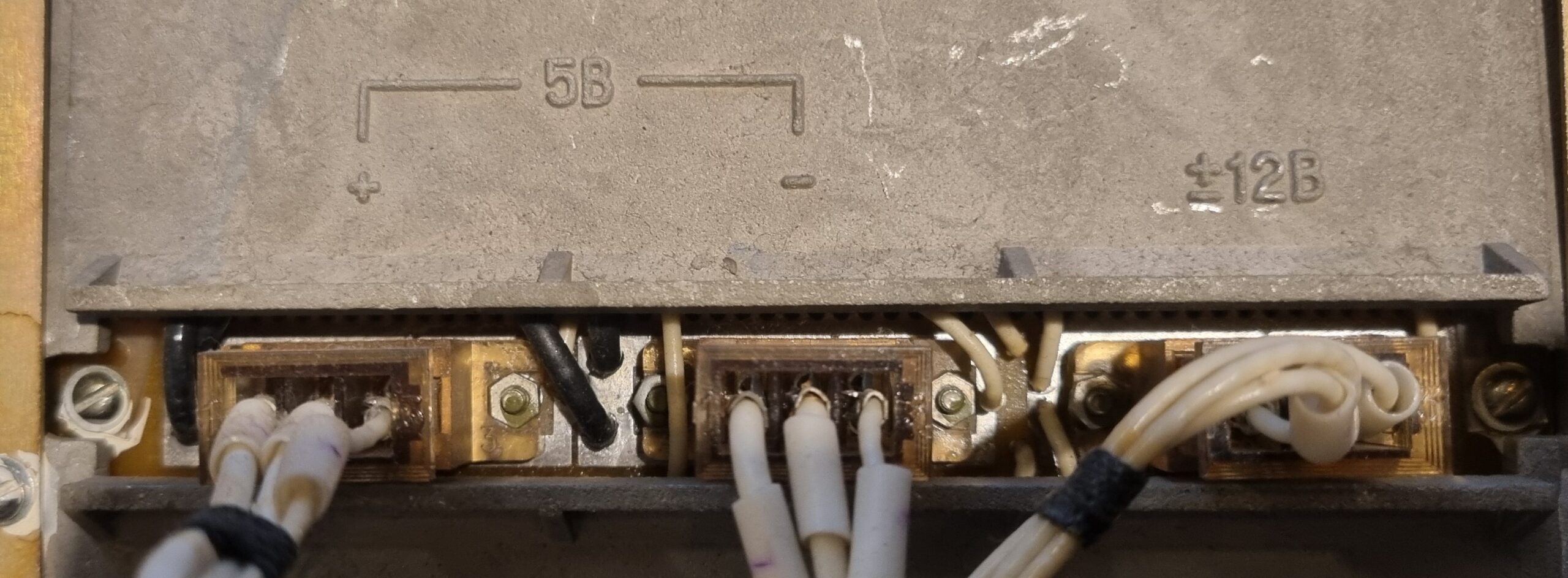
O dabar didelė foto galerija su didelėm nuotraukom. Kad pamatyti, kokį kompą padarė “atominė” valstybė “beveik” savo jėgomis. Prie šios kvailystės dirbo cielas institutas Kijeve. Prie nuotraukų parašiau trumpus komentarus. Agregatas pagagamintas po 1990 metų.
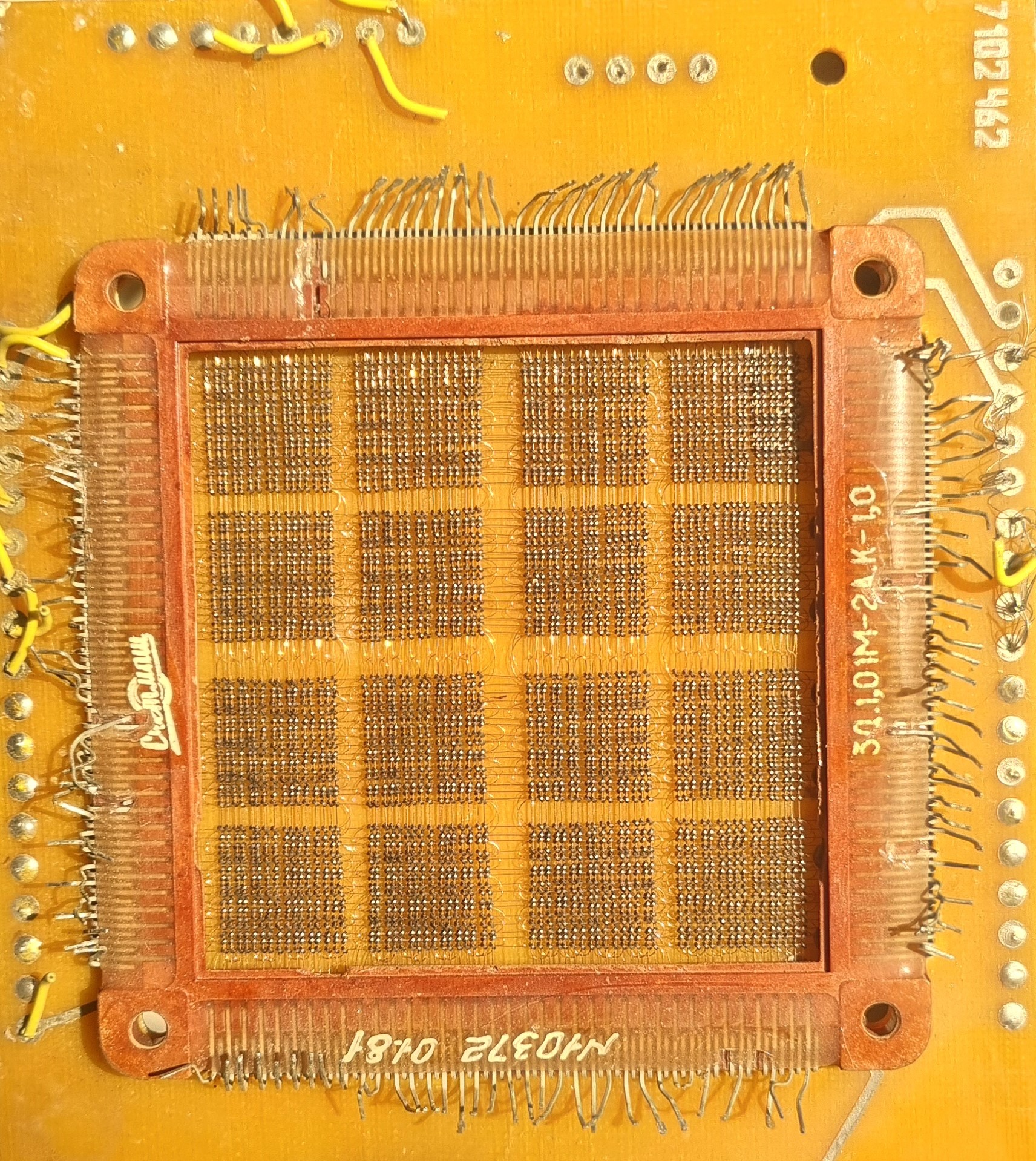
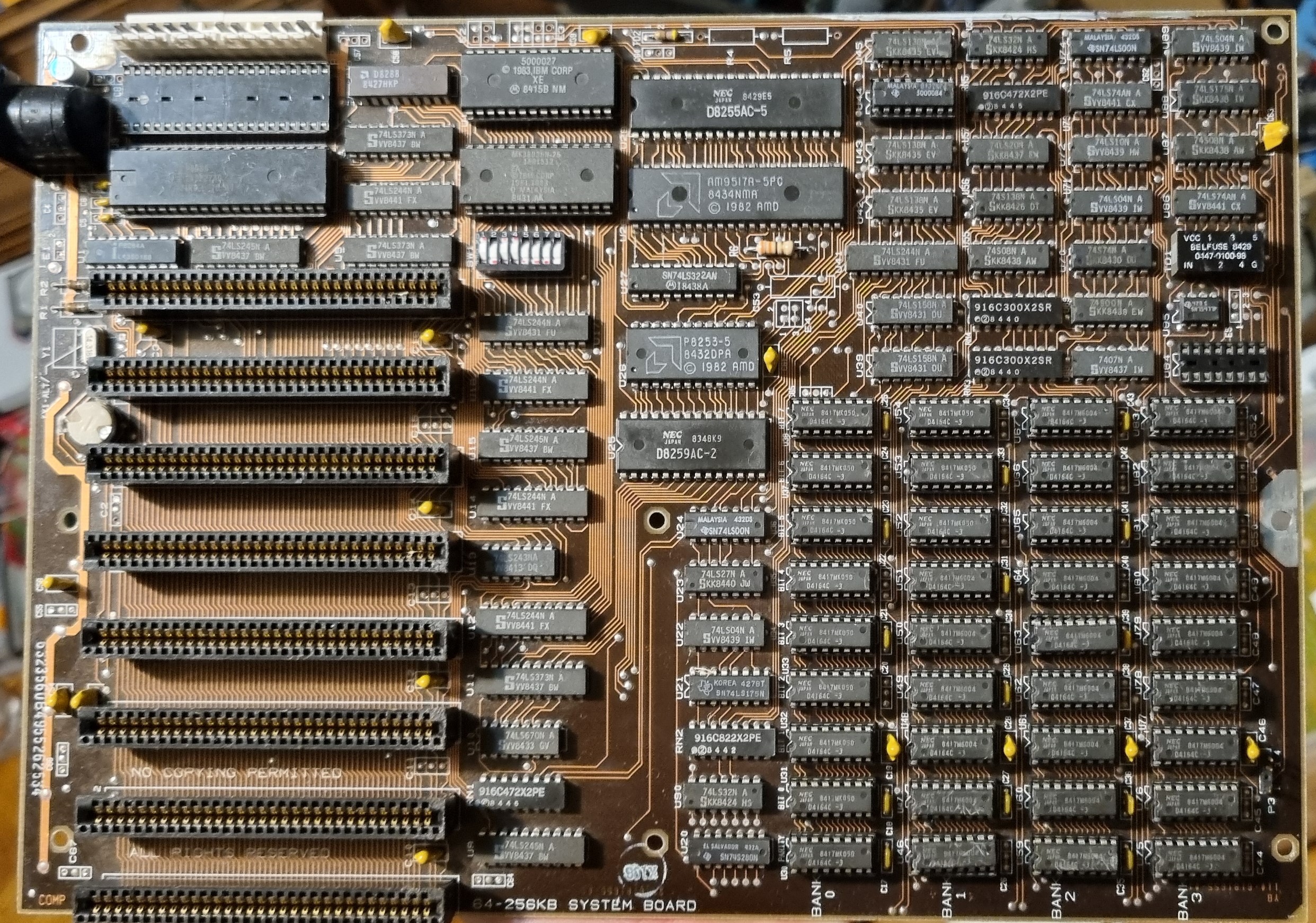
Čia visas kompas, be monitoriaus. FDD blokas atskirasTik dugnas. Ardymas paprastas, tik šliciniai varžteliai…Didelis ventiliatorius ir nestandartinės jungtys- su jungtimis pas sovietus visada buvo blogaiČia ne suvirinimo aparato jungtis. O tik iki 150W maitblokis.klavietūra (net DIN neturėjo), video, fdd? LPT?Vau. ISA čia netiko, geriau klonuojam MULTIBUSAš ne prieš wirewrap. Ypač kai tavo fabrikai nesugeba pagaminti PCB.Bendras vaizdas. Primeskit kokio dydžio maitblokis. Neatmetu 50Hz trafo.Galinė sienelė be plastiko.FDD kontroleris. Jo, Karlai, čia FDD kontroleris. “Mūsų megapramonė” nesugeba padaryti čipų. Dedam JAPAN import.Čia RAM. 256KBRU5 valdo.Procesoriaus plokštė. Ir ROMai.Taip, tai 8086 klonasMax 2 sluoksniai ant PCB. Jei reikia daugiau- naudojam vielutes. Tai video plokštėCRT kontroleris yra greituminė mikroschema. Kopijavimas baigėsi bugova ВГ75“дуал сериал порт”Taimeriai ir serial. Dėl ВИ51 ir ВВ55 nesuderinimo neveikia PC softas!Greičiausiai LPT portas arba GPIB (IEE488)Du 8255Power jungtys iš maitblokioPower jungtys ant backplane150VAFlopikaiO je, flopikų maitblokis su žaliu 50Hz trafuPower elektronikaFDD Bulgariškas, bet motoras japoniškas.Bulgarija specializavosi FDD ir HDDTačiau be importo niekaipČia buvo FDD jungtysNeįtemą. Gerai kad ne tokia atmintis. Čia 512 baitų.O čia tas, ką jie norėjo nukopijuoti. Tai PC XT motininė. Mikroschemų mažiau, nors VLSI kaip ir nėra! Tiesa, nėra video ir FDD. Bet gaminta apie 1984!
Aš tikrai nežinau, ar verta atgaivinti šitą nesąmonę. Aš nesu tarybinės technikos kolekcininkas. Vienintelis kompas kurį norėčiau gauti tai ДВК-2 (nes teko kiek padirbti su tokiu. Sentimentai). Taigi jei kas turit, tai galime mainytis, netgi su priemoka.
O dabar apie sankcijas. Sankcijos padeda- tiesa lėtokai, bet pilnai susmugdo šalies progresą. O kai nėra progreso, nėra ekonomikos. O kai nėra ekonomikos ir progreso, tai net atominės bombos gali ir nebeveikti.
Диалоговый вычислительный комплекс. DEC PDP-11 klonas. ↩︎
Sausis- labai tamsus mėnuo. Plius- peršalau lakstydamas kieme. Todėl nieko ir nedariau. O reikėtu… O dar 18€ investicija į lavos lempą. Tiesiog galima sėdėti ir steiblitis į tą lempą. Dar pavyko nusipirkti pigiai vieną raritetą mano kolekcijai. O štai virtuvės remontas pastrigo, nes tingiu ir šalta ir tamsu.
Sėdi ir stebio, lavos lempaCommodore PETVirtuvės siena apšiltinta ir “išlyginta”Naudojau folga-pir-folga-gipsas sumuštinį.
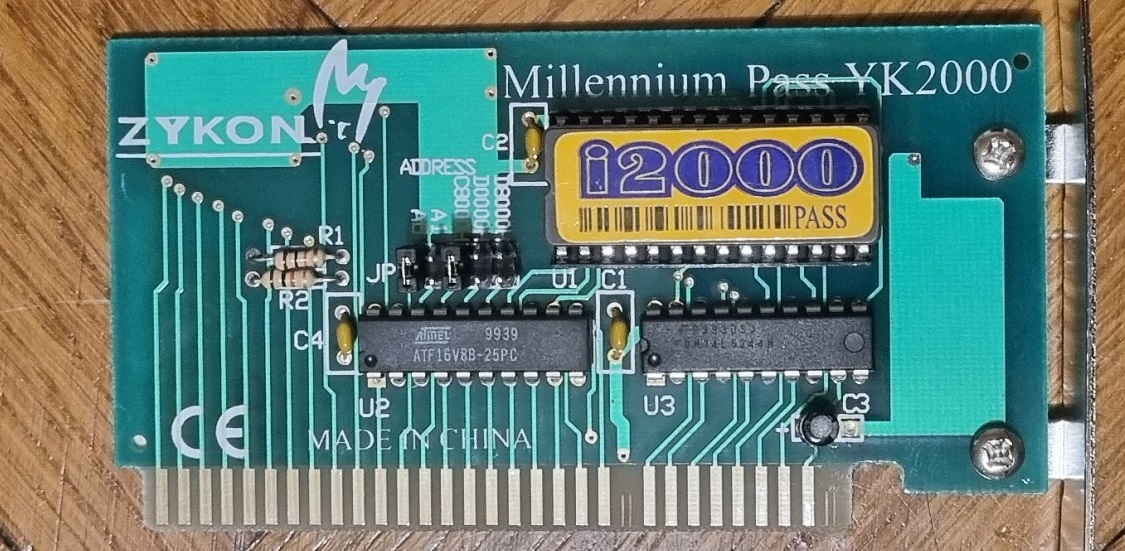
Papuolė į rankas tokia maža ISA PCB su keliais čipais. Su magišku užrašu “Y2000”. Ir iškarto trenkė nostalgija, apie tai, kaip visi panikavo, kad kompiuteriai 2000-taisiais metais išprotės, nes metai tik dviženklis skaičius. Aišku buvo bėdų su tais metais, bet daugelis panikuotojų nepagalvojo, kad technologija smarkiai tobulėja ir kompai pradėjo labai greitai morališkai senti.
O tiems, kurie strigo su sena technika, atsirado visokie BIOS pataisymai. O jei nėra BIOS pataisymo, va jums papildoma plokštė su ROM. (Kitos mikroschemos tik supaprastina ROM pajungimą prie ISA linijų)
Nutariau pažiūrėti, kas tos mikroschemos viduje. Viduje labai mažai kodo, tai buvo kaip tik, kad pasimokinti Hidros (GHIDRA) programos vartojimo.
ISA PCB yra 8 bitų. Vadinasi suderinama su pačiais primityviausiais x86 procesoriais. Vadinasi kiek rimtesni procesoriai turi veikti “REAL MODE” režime. x86 procesoriaus kodas vos vos panašus į Z80 ir tikrai panašus į 8086. Hidra išardė kodą. O internetai padėjo atpažinti- pirmi trys baitai tai 55 AA 10. “55AA” tai signatūra, o 10 tai programos ROM dydis (kart 512 baitų, h100). O nuo 4 baito prasideda pati programa.
Konkreti Y2K PCB darė šitą: išvalo ekraną (rodos), parašo užrašą, nuskaito dalį RAM ir kažką paskaičiuoją ir jei nepavyko, sako error ir išeina, nuskaito RTC per BIOS, nuskaito RTC tiesiogai, palygina, ir jei kažkas gaunasi arba rašo, kad kompas suderinamas su Y2K arba bando (?) pačinti BIOSą. Čia jau spėlioju, nes mano žinio gana trumpos čia.
Kilo mintis padaryti va taip:
Copy-paste kažkiek asemblerio mnemonikų… ir kaip sukompiliuoti? Internetai sako, kad standartinis GCC, su raktažodžiais tipo “-m16 -nostdlib -ffreestanding” turi gaminti x86, 16bitų, REAL kodą. Ir tikrai, kopijuotas kodas iš Hidros susikompiliavo. Toliau teko kankintis su LD.exe ir visokiais loaderiais, kad gautųsi ROM image, o ne exe failas. Tai irgi buvo pilnas nuotykių žaidimas kuris nepavyko iki galo.
Tačiau kodas neveikė realiuose kompiuteriuose.
Ir pasirodo, kad JOKS GCC nesugeba generuoti teisingą 16 bitų, REAL MODE kodą. Iš principo. Binarinių failų palyginimas parodė, kad CALL, RETF ir gal kitokios instrukcijos generuojamas 32 bitų. Tas 32 bitų kodas “kaip ir suderinamas”, bet kai paleidi iš BIOSo, tai tikrai nesuderinamas. Ir nesvarbu koks procesorius- 486DX irgi nesuprato.
Rašyti softą be CALL kaip ir sunkoka. Gerai, kad čia tik kelios eilutės- išvalyti ekraną, per BIOSą (TTY režime) išspjauti tekstą ir nuskaityti ANYKEY iš klaviatūros. Teko viską perrašyti tiesiogiai. Ir rankutėmis įkelti “RETF” teisingą kodą programos gale. Kodu nesidalinu, nes jis baisus, nesuprantamas ir ten per daug POP/PUSH (kopijavau iš tikrų paprogramių, kur išsaugoja registrus). Svarbu veikia.
ROMas turi primityviausią kontrolinę, 8 bitų, sumą. Todėl reikią paskutinį baitą ROMe kaitalioti tol, kol suma nepasidaro 00.
O dar radau keistą PCI plokštę iš Izraelio- kažkoks tipo “security”. Pati PCB tai kastruota tinklo plokštė su BOOT ROM. Jei bus azarto, bus galima pasinagrinėti šitą kodą.
Taigi, be normalaus asemblerio, koduoti ROMą labai sunku. O tiek turėjau planų- panaudoti C kalbą ROMe ir PC kompiuterį panaudoti kaip mikrokontrolerį. Kam? Ogi smalsu. Nebent PCI kompiuteriai jau tikrai valgo 32 bitus ROMe.
O grynai asembleris tai NASM. Jam puikiausiai kompiliuojasi. Tikriausiai komentaruose bus pilnas komplektas NASM kompiliatoriui.
Jau trečia krosnis genda dėl to pačio gedimo. Pirmas kartas buvo 2020 metais, antras- 2021. O dabar, 2024 metų pabaigoje ir vėl.
Šį kartą video variantas. Nes tai jau tipinis gedimas. Lėtas darbas, nes žiūriu serialą ir kartu remontuoju.
Video nepilnai chronologiška- kažkuriuo metu buvo savaitės pertrauka, nes tingėjau važiuoti ir pirkti kondensatorius. O rezistorius palikau originalius, nes tokių neturiu ir nežinau ar galima mažą kiekį nusipirkti. O ir šiaip jie geri. Milžiniškas – fliuso ar kanifolijos kiekis ant PCB? Nežinau, klauskit kinų. O štai mano fliusas uždžiuvo.
Ir nebijokit, kad čiupinu tipo 400V maitinimo pusę. Daugelis impulsinių maitblokių pasileidžia nuo ~30V.
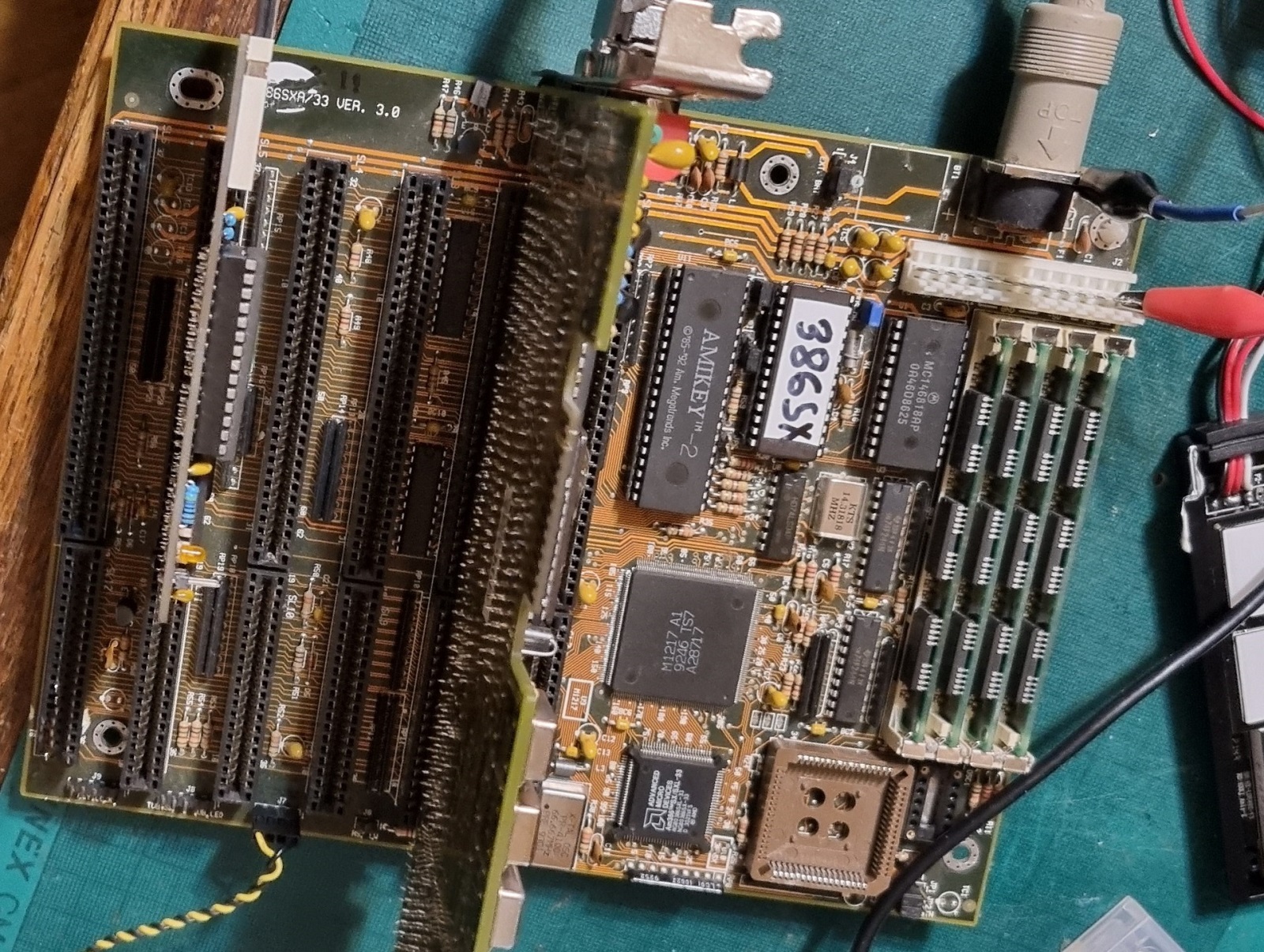
Pagaliau! Iš kokio šešto karto pavyko rasti 386 kuris pasileido. Aišku čia ne originalus intelio, bet Amd klonas ir pavadinimas tikriausiai toks: Lucky Star 386SXA.
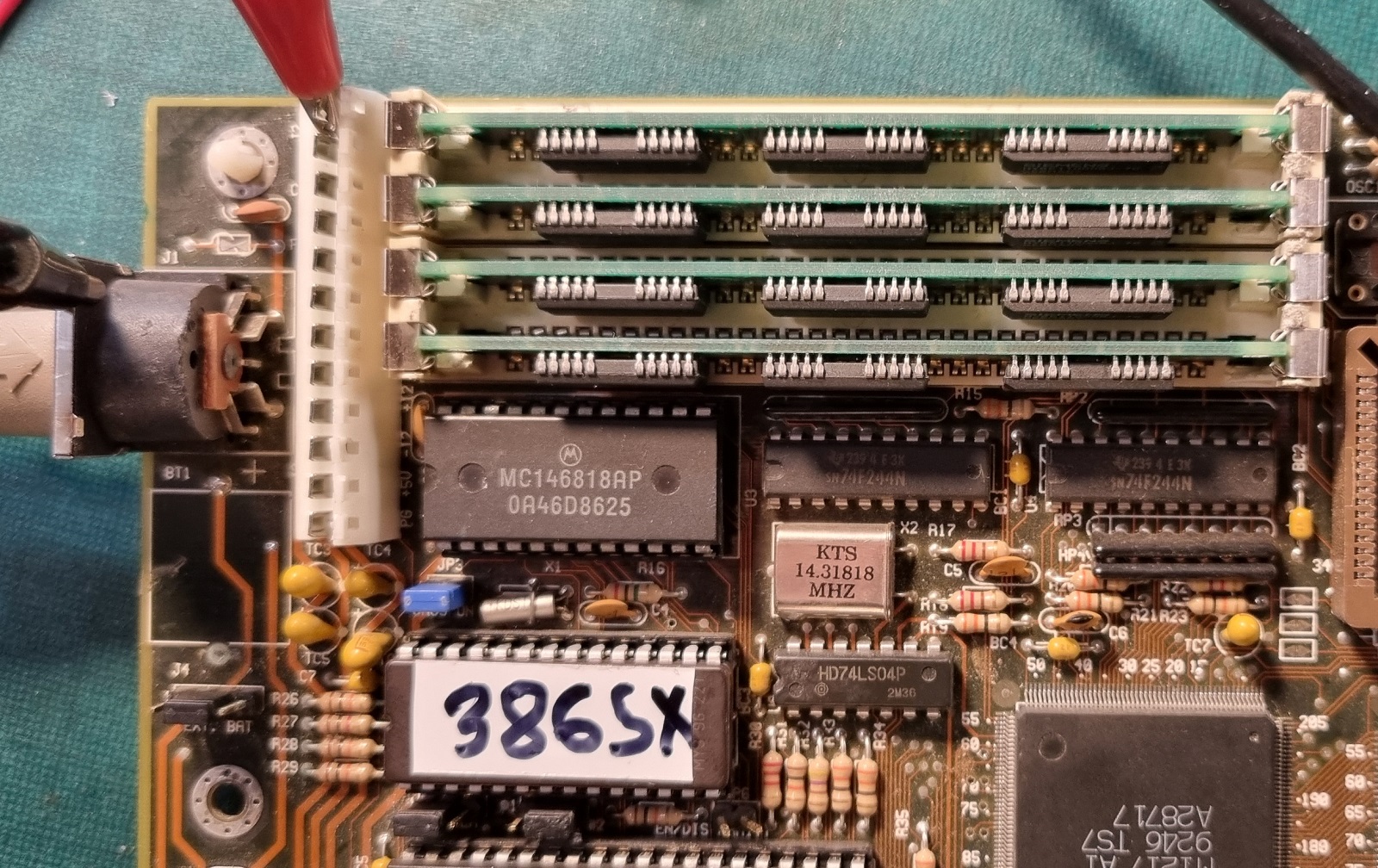
PCB buvo gera, nes kažkas pašalino batareiką. Ir … pakeliui pašalino RTC, BIOS ir klaviatūros kontrolerio čipus. Aišku dar ir išlupo RAM tiesiai, nulauždamas visus fiksavimo elementus. BIOSą lygtai radau internete- kiek naujesnės versijos PCB, bet su tuom pačiu (tikriausiai) čipsetu. Ir iš Laimingos žvaigždės pavirto Aceriu. Nors pirmuosiuose testavimuose veikė ir su kito, DX kompiuterio BIOSu. (Čia 16 ir 32 bitų skirtumas, jei ką). Klaviatūros kontroleris kažkoks atsitiktinis, iš naujesnio kompiuterio. Nusprendžiau, jei pradžioje parašyta “AMI”, tai bus suderinamas su “American Megatrends”. VGA plokštė irgi kiek apkramtyta- biški nėra RAM čipų. Tai ne visos spalvos veikia.
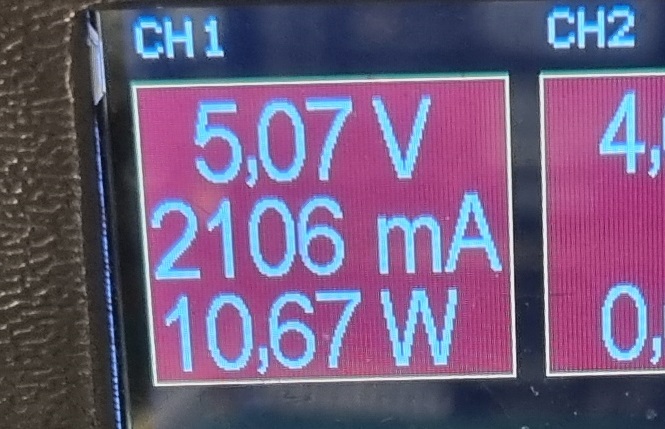
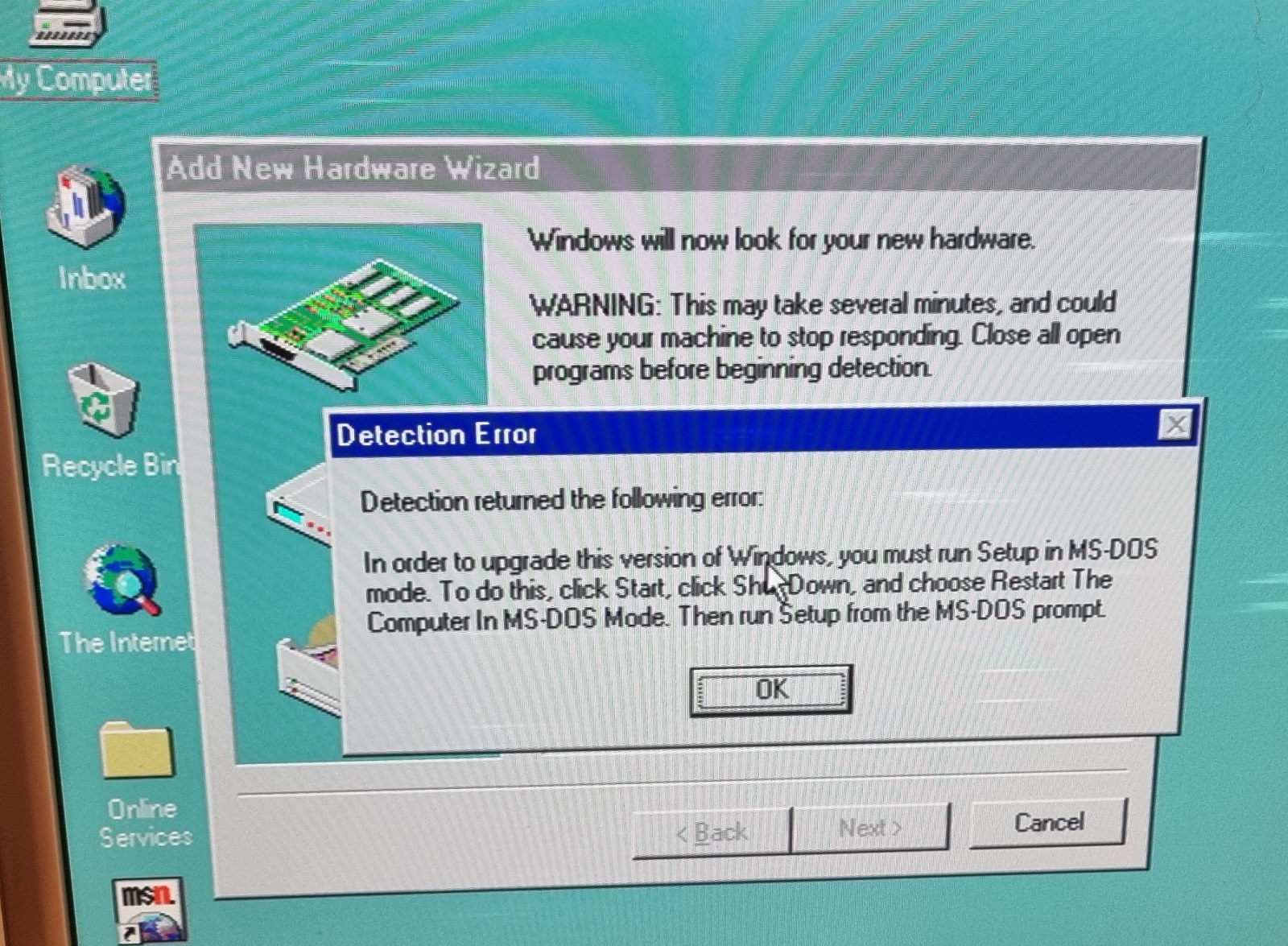
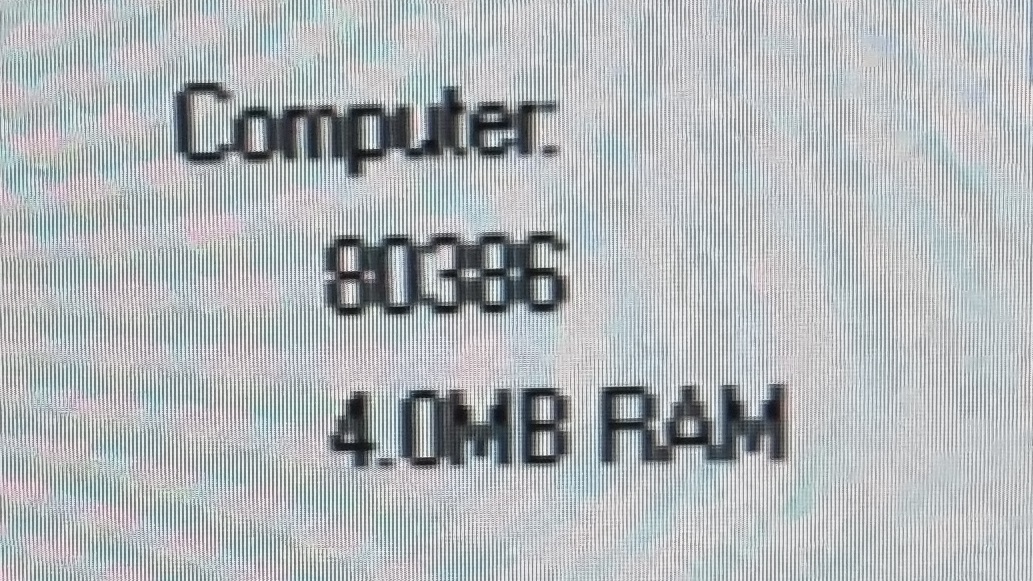
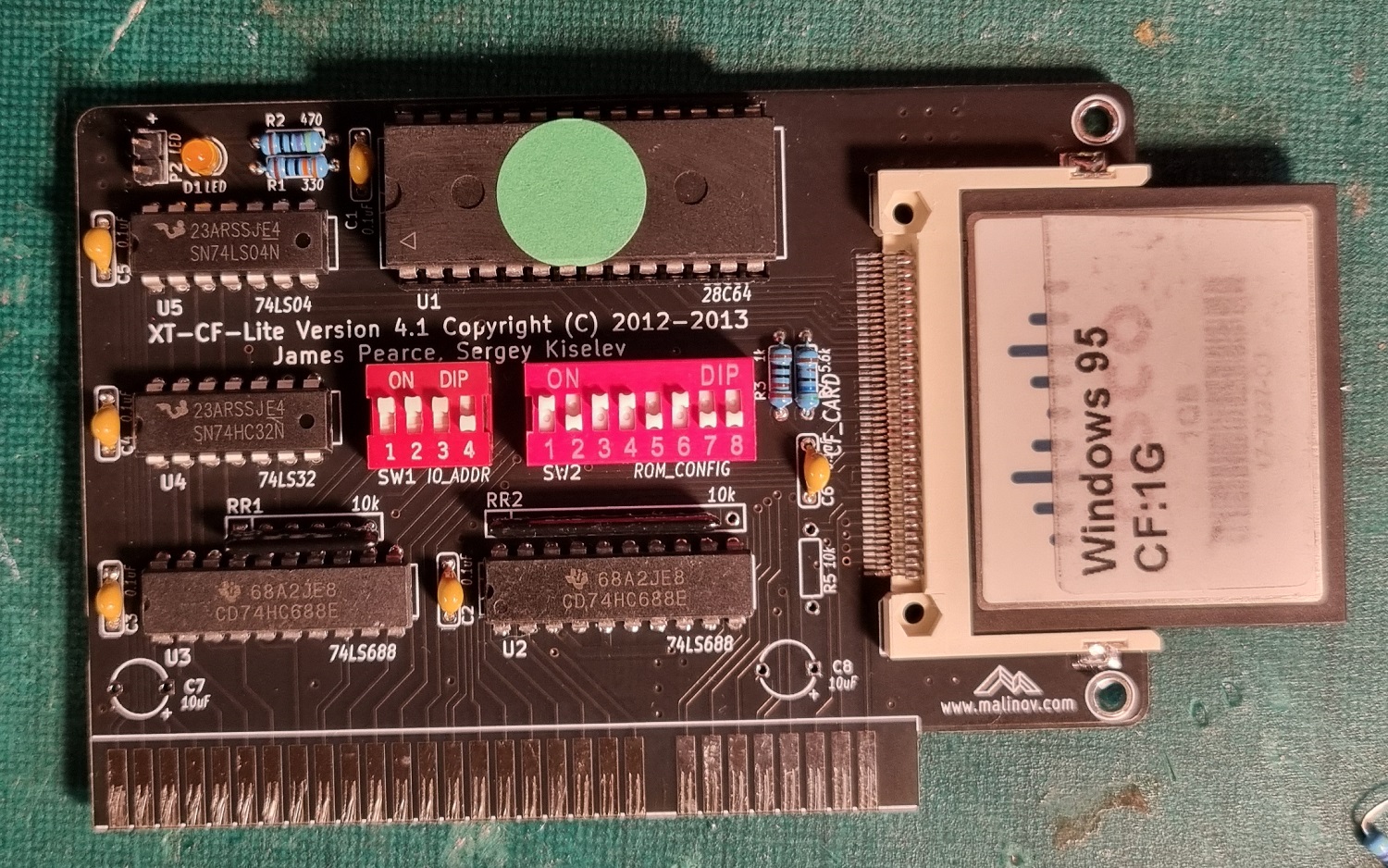
Tik 5VWindowsai pykstaNematos ar SX ar DXXT 8-bit ISA CF HDD adapteris. Naujadaras.
Kas įdomiausia, kompiuteris veikia nuo vieno maitinimo- nuo 5V. Ir ima kiek daugiau nei 10W, čia su VGA ir kieto disko plokšte. HDD plokštė tai naujadaras, skirtas XT kompiuteriams. Tačiau pasirodo, suderinamas su 386 kompiuteriu.
Turiu nulenkti galvą Taivanio kompiuterių “unifikavimui”- sukišus atsitiktines detales kompas vis tiek pasileido (a, dar RTC, tai košerinis Motorolos čipas). Ir net pasileido Windows 95. Leidosi ir 98, bet pradėjo pykti dėl draiverių ir šiaip čia viskas labai lėtai veikia- čia 33MHz papimpintas 286 (386SX).