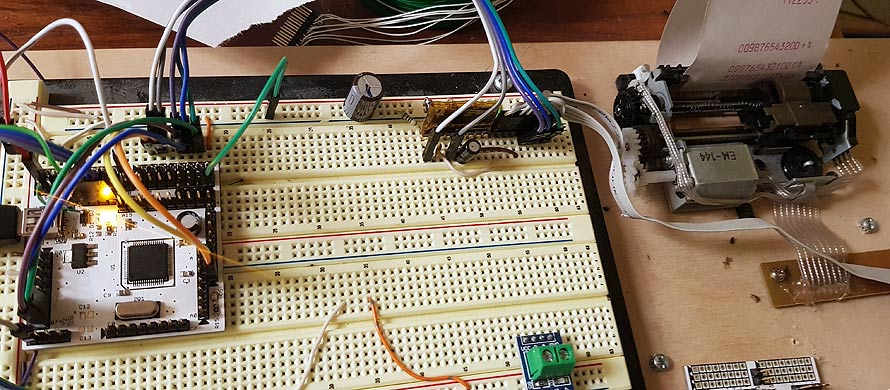
Jau rašiau, kad internetuose radau Rogue žaidimo source code kuris netikėtai susikompiliavo ant mano kompiuterio. Deja ant kitų kompiuterių jis neveikė. Bandžiau tokį iškrypimą, kaip perkelti source code į Microsoft Visual Studio Express, bet ten tikriausiai iš principo negali veikti jokie senoviški C kalbos failai- microsofto programa pranešinėjo keistas klaidas. Numojau į tai ranka ir pagalvojau- jei kompiliuojasi su gcc, tai kodėl jis nesikompiliuoti ir su ARM gcc (AVR tai gal per silpnas). Pasirodo, puikiausiai kompiliuojasi. Teko tik išpjauti dali paprogramiu susijusiu su failais ir prikabinti savo. Taip gavosi toks monstras:
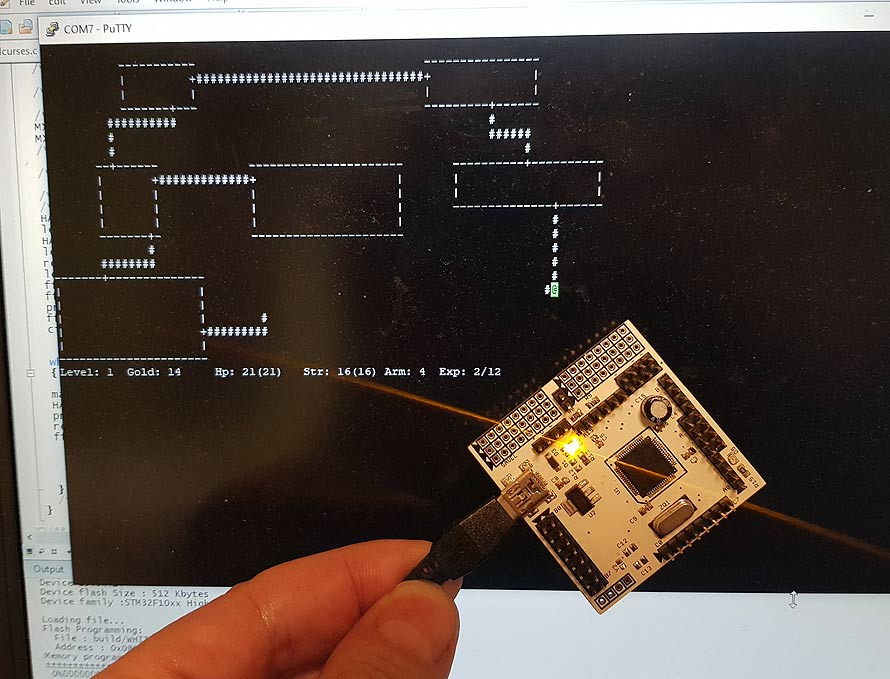
Tai USB-COM-Rogue su STM32F103. Tereikia tik USB terminalo. Po tiekos programinimo, manau UART versija dar greičiau gautusi. Dar beliko viską sukultūrinti, nes dar liko visokių bugų- pvz. po žaidėjo mirties, jis kaip zombis toliau gali vaikščioti po labirintą. Nesvarbu, kad jau parodė mirties ekraną- turėjo pasileisti žaidimas iš naujo, bet kažkaip neišsivalė buferiai ir viskas liko iš seno žaidimo. Visiškai nesupratau dėl TERMCAP failo- vieną įdėjau ir veikia, įdėjau antrą- neveikia. Vėl įdėjau pirmą- neveikia. Veikia tik iš vakar dienos backupo. Originalus source kodas gana užsuktas. Užtat ir ant ARM gcc kompiliuojasi be jokių “warningų”.
Žaidimo source code ir kompiliuotas HEX. Dėmesio! Binaras gaunasi didelis (92kB ir neaišku kiek RAM jam reikia) ir tikrai neveiks ant BluePill. Jis veikia ant mano “white pill“, su pilnaverčiu STM32F106RET6.